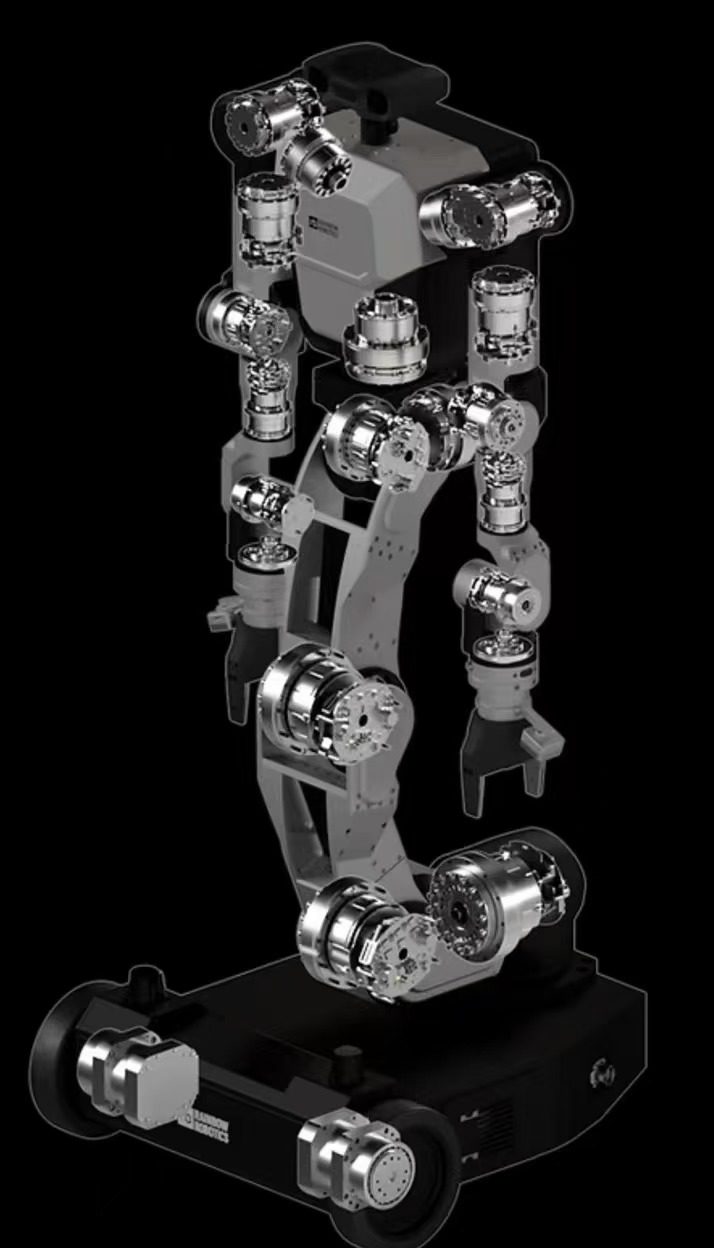
Moteur de joint robot sans cadre planétaire harmonique
Moteur d'articulation harmonique
Les moteurs de joint à transmission harmonique HONPINE se caractérisent par une haute précision, un couple élevé et un grand diamètre de noyau creux, offrant souvent des solutions pour des applications dans des espaces confinés. La personnalisation est prise en charge, et ces moteurs sont fréquemment utilisés dans le domaine de la robotique spécialisée.
 Motoréducteur harmonique robotique à encodeurs haute précision avec STOLe motoréducteur harmonique robotique HAG est un actionneur d’articulation robotique spécialement conçu pour les applications robotiques. Le variateur intégré est intégré à la base du motoréducteur, et il est équipé d’encodeurs haute précision—résolution 20 bits côté haute vitesse et 19 bits côté sortie—permettant un contrôle en boucle fermée complet. Des fonctions STO et frein sont disponibles en option pour garantir un fonctionnement plus sûr de l’équipement.Détails
Motoréducteur harmonique robotique à encodeurs haute précision avec STOLe motoréducteur harmonique robotique HAG est un actionneur d’articulation robotique spécialement conçu pour les applications robotiques. Le variateur intégré est intégré à la base du motoréducteur, et il est équipé d’encodeurs haute précision—résolution 20 bits côté haute vitesse et 19 bits côté sortie—permettant un contrôle en boucle fermée complet. Des fonctions STO et frein sont disponibles en option pour garantir un fonctionnement plus sûr de l’équipement.Détails Module d'articulation harmonique homme-robot avec capteur de couple et connecteur de câble intégréLe module d’articulation harmonique TCHL est un module d’articulation harmonique qui intègre directement un capteur de couple dans le réducteur à entraînement harmonique. Le capteur de couple permet une surveillance de l’état de fonctionnement du système d'entraînement et des valeurs de couple requises, permettant une détection précise de la charge de l'actionneur. Cela aide à prévenir les surcharges et permet une interaction homme-robot plus sûre.
Module d'articulation harmonique homme-robot avec capteur de couple et connecteur de câble intégréLe module d’articulation harmonique TCHL est un module d’articulation harmonique qui intègre directement un capteur de couple dans le réducteur à entraînement harmonique. Le capteur de couple permet une surveillance de l’état de fonctionnement du système d'entraînement et des valeurs de couple requises, permettant une détection précise de la charge de l'actionneur. Cela aide à prévenir les surcharges et permet une interaction homme-robot plus sûre.
Le module est doté de câbles et connecteurs entièrement intégrés, permettant des connexions de composants rapides et précises, et un contrôle de mouvement sûr et réactif grâce à une conception hautement intégrée.Détails Module rotatif harmonique de type T pour bras de robot CobotsLe module d'articulation harmonique de type T est une unité d'articulation robotique hautement intégrée qui combine un réducteur harmonique, un moteur à couple, des capteurs de précision, un frein et un driver. Il est appelé « type T » car la bride de sortie est perpendiculaire à l'arbre du moteur, formant une disposition en T idéale pour les articulations rotatives des robots.
Module rotatif harmonique de type T pour bras de robot CobotsLe module d'articulation harmonique de type T est une unité d'articulation robotique hautement intégrée qui combine un réducteur harmonique, un moteur à couple, des capteurs de précision, un frein et un driver. Il est appelé « type T » car la bride de sortie est perpendiculaire à l'arbre du moteur, formant une disposition en T idéale pour les articulations rotatives des robots.
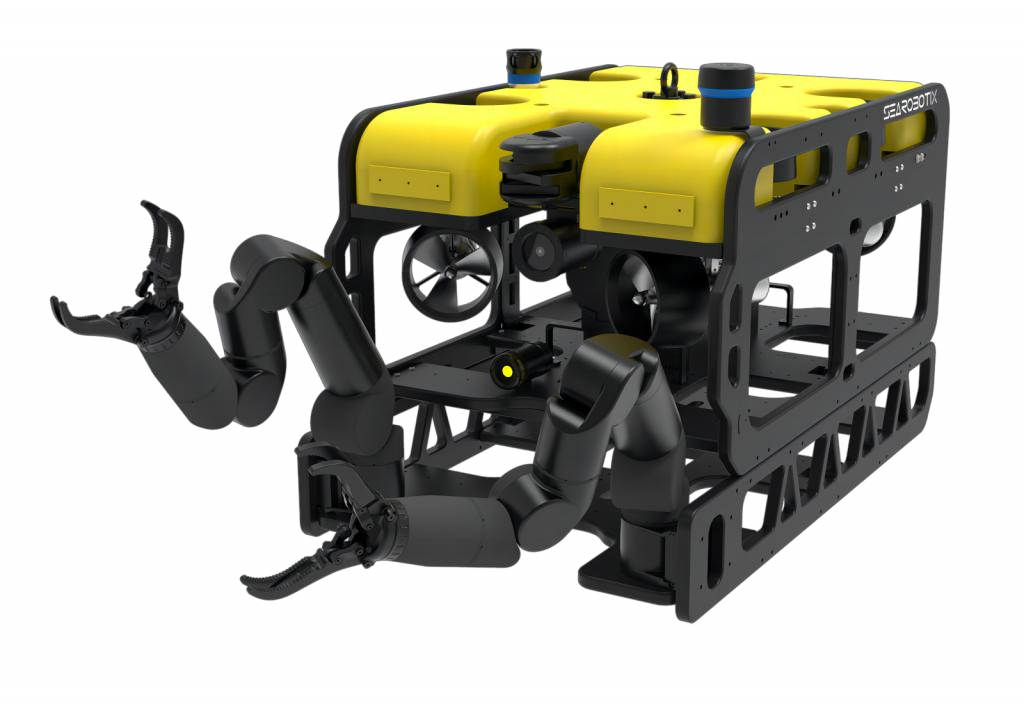
Conçu pour les robots collaboratifs, ce module simplifie le développement en intégrant les composants clés dans une unité compacte prête à l'emploi. Cela réduit considérablement le cycle de développement, abaisse les coûts et rend la construction d'un bras robotique presque aussi simple que l'assemblage de blocs LEGO. Sa haute intégration améliore également l'efficacité de la maintenance et élargit l'applicabilité de la technologie des bras robotisés industriels.Détails Module d'articulation robotique à conception étanche pour robot spécial d'opération sous-marineLe module d'articulation atteint un volume et un poids hautement optimisés grâce à des composants entièrement intégrés incluant réducteur harmonique, moteur sans cadre, frein, codeur et driver, permettant un contrôle de mouvement précis avec un couple plus élevé, une précision accrue, une taille plus compacte et un poids plus léger. Nous proposons également des solutions sur mesure pour répondre à des exigences spécifiques d'applications personnalisées et d'environnements opérationnels particuliers, les personnalisations les plus courantes étant les versions étanches (résistantes aux éclaboussures, aux jets d'eau ou à une immersion jusqu'à 1 mètre) et les adaptations pour basses températures. Ce module d'articulation étanche est spécialement conçu pour les robots spéciaux opérant sous l'eau, développé comme une version améliorée de notre module d'articulation standard avec des améliorations dédiées pour relever les défis d'étanchéité des articulations robotiques.Détails
Module d'articulation robotique à conception étanche pour robot spécial d'opération sous-marineLe module d'articulation atteint un volume et un poids hautement optimisés grâce à des composants entièrement intégrés incluant réducteur harmonique, moteur sans cadre, frein, codeur et driver, permettant un contrôle de mouvement précis avec un couple plus élevé, une précision accrue, une taille plus compacte et un poids plus léger. Nous proposons également des solutions sur mesure pour répondre à des exigences spécifiques d'applications personnalisées et d'environnements opérationnels particuliers, les personnalisations les plus courantes étant les versions étanches (résistantes aux éclaboussures, aux jets d'eau ou à une immersion jusqu'à 1 mètre) et les adaptations pour basses températures. Ce module d'articulation étanche est spécialement conçu pour les robots spéciaux opérant sous l'eau, développé comme une version améliorée de notre module d'articulation standard avec des améliorations dédiées pour relever les défis d'étanchéité des articulations robotiques.Détails Grand actionneur rotatif à entraînement harmonique à alésage creuxLe grand actionneur rotatif à alésage creux intègre généralement un moteur à couple sans cadre à rotor interne avec des composants tels qu'un réducteur à entraînement harmonique, un codeur absolu et une unité d'entraînement harmonique à grand alésage creux sur mesure pour former un ensemble d'actionneur rotatif complet. Son unité de contrôle (système d'entraînement) est généralement montée à l'extérieur, permettant un contrôle de mouvement de haute précision pour les équipements connectés. Par rapport aux actionneurs rotatifs standard, cette série se caractérise par un diamètre d'alésage creux plus grand, permettant le passage de vis-mères, de câbles et d'autres composants. Il est conçu pour des applications nécessitant un grand espace d'alésage traversant, une haute précision et une intégration compacte, telles que les tables rotatives de machines-outils, les dispositifs médicaux de précision, les systèmes de découpe laser 5 axes et les équipements semi-conducteurs.Détails
Grand actionneur rotatif à entraînement harmonique à alésage creuxLe grand actionneur rotatif à alésage creux intègre généralement un moteur à couple sans cadre à rotor interne avec des composants tels qu'un réducteur à entraînement harmonique, un codeur absolu et une unité d'entraînement harmonique à grand alésage creux sur mesure pour former un ensemble d'actionneur rotatif complet. Son unité de contrôle (système d'entraînement) est généralement montée à l'extérieur, permettant un contrôle de mouvement de haute précision pour les équipements connectés. Par rapport aux actionneurs rotatifs standard, cette série se caractérise par un diamètre d'alésage creux plus grand, permettant le passage de vis-mères, de câbles et d'autres composants. Il est conçu pour des applications nécessitant un grand espace d'alésage traversant, une haute précision et une intégration compacte, telles que les tables rotatives de machines-outils, les dispositifs médicaux de précision, les systèmes de découpe laser 5 axes et les équipements semi-conducteurs.Détails Moteur de joint de robot compact à entraînement harmonique hautement intégréLe moteur d'articulation robotique réalise un contrôle de mouvement hautement précis grâce à des composants intégrés incluant un réducteur harmonique, un moteur à couple sans cadre, un frein, un codeur et une unité d'entraînement, avec une taille et un poids optimisés. Il offre un couple plus élevé, une précision supérieure, une taille plus compacte et un poids plus léger. Nous proposons également des services de personnalisation selon les exigences spécifiques des clients.
Moteur de joint de robot compact à entraînement harmonique hautement intégréLe moteur d'articulation robotique réalise un contrôle de mouvement hautement précis grâce à des composants intégrés incluant un réducteur harmonique, un moteur à couple sans cadre, un frein, un codeur et une unité d'entraînement, avec une taille et un poids optimisés. Il offre un couple plus élevé, une précision supérieure, une taille plus compacte et un poids plus léger. Nous proposons également des services de personnalisation selon les exigences spécifiques des clients.
Les moteurs d'articulation robotique prennent généralement en charge une large plage de tension de DC24V à DC48V. En tant que composant central dans l'industrie de la robotique, les avancées technologiques des moteurs d'articulation robotique continueront de promouvoir le développement de robots spécialisés et humanoïdes vers une plus grande flexibilité et des scénarios d'application plus larges. Au-delà de la robotique, les moteurs d'articulation robotique sont également utilisés dans les équipements semi-conducteurs, les équipements photovoltaïques, les équipements médicaux de précision, les équipements 3C, les équipements optoélectroniques et d'autres domaines.Détails






Moteur d'articulation planétaire
Le moteur de joint planétaire est également un composant central des systèmes de puissance robotiques. Par rapport aux modules de joint harmonique, il présente un rapport de réduction plus faible, une vitesse de sortie plus élevée et une plus grande rigidité, bien qu'avec une précision de sortie globale légèrement inférieure. Grâce à des composants hautement intégrés comprenant des réducteurs planétaires, des moteurs couple sans cadre, des freins, des encodeurs et des variateurs, sa taille et son poids sont considérablement optimisés, permettant un contrôle précis du mouvement des articulations. Il en résulte un couple plus élevé, des dimensions plus compactes et un poids plus léger. Les moteurs de joint planétaire prennent généralement en charge une large plage de tension, s'adaptant à une basse tension DC 24V~48V. Nous proposons également des solutions personnalisées en fonction des exigences individuelles des clients.
 Actionneur articulaire planétaire de chien robotique étanche à l’explosion et robusteLes actionneurs articulés planétaires antidéflagrants robustes de HONPINE sont officiellement entrés en production de masse. Cette série d’articulations a été intégrée avec succès dans plusieurs plateformes de robots quadrupèdes (chiens robots) et déployée dans des environnements dangereux tels que les sites pétrochimiques, les sites d’inspection du gaz naturel et les opérations de secours d’urgence — des domaines qui dépendaient auparavant fortement du travail manuel ou de composants importés.
Actionneur articulaire planétaire de chien robotique étanche à l’explosion et robusteLes actionneurs articulés planétaires antidéflagrants robustes de HONPINE sont officiellement entrés en production de masse. Cette série d’articulations a été intégrée avec succès dans plusieurs plateformes de robots quadrupèdes (chiens robots) et déployée dans des environnements dangereux tels que les sites pétrochimiques, les sites d’inspection du gaz naturel et les opérations de secours d’urgence — des domaines qui dépendaient auparavant fortement du travail manuel ou de composants importés.
Assistance à l’intégration spécifique à l’application : structures mécaniques et paramètres de commande personnalisés, adaptés aux différentes configurations de robots et aux exigences des missions.
Assistance à la certification antidéflagrante : accompagnement tout au long du processus de certification, aidant les clients à éviter les pièges de conception courants et à accélérer la mise en conformité.
Support technique rapide : centres de service technique situés dans les principales régions industrielles du pays, offrant une intervention sur site sous 48 heures.Détails Modules d'articulation planétaires légers à couple de sortie maximalLes modules d’articulation planétaire de la série PA de HONPINE disposent de trois brevets d’invention exclusifs et de sept brevets de modèle d’utilité. Grâce à une conception structurelle ingénieuse, ils offrent le couple de sortie le plus élevé parmi les produits de la même catégorie, assurant des performances puissantes et stables.
Modules d'articulation planétaires légers à couple de sortie maximalLes modules d’articulation planétaire de la série PA de HONPINE disposent de trois brevets d’invention exclusifs et de sept brevets de modèle d’utilité. Grâce à une conception structurelle ingénieuse, ils offrent le couple de sortie le plus élevé parmi les produits de la même catégorie, assurant des performances puissantes et stables.
HONPINE fournit d’importantes ressources produit et un support technique, permettant un déploiement rapide dans divers scénarios d’application tout en réduisant considérablement le temps, les efforts et les coûts requis pendant la phase de pré-étude du projet.
Les modules adoptent une conception d’entrée/sortie partagée pour l’alimentation et le signal, simplifiant grandement la connexion entre les unités d’entraînement. Associée à une structure de câblage traversant creuse, l’application et l’intégration des unités d’entraînement deviennent plus pratiques et plus efficaces.Détails Module d’articulation planétaire compact, léger, résistant aux impacts et à grande vitesseLe module d’articulation planétaire standard est un composant central des systèmes de puissance robotisés. Grâce à une conception hautement intégrée combinant un réducteur planétaire, un moteur couple sans carcasse, un frein, un encodeur et un variateur, il permet une optimisation significative du volume et du poids, assurant un contrôle précis du mouvement de l’articulation. Il en résulte un couple plus élevé, une taille plus compacte et un poids plus léger. Comparé aux modules d’articulation harmoniques, le module d’articulation planétaire présente un rapport de réduction plus faible, une vitesse de sortie plus élevée et une densité de couple supérieure, ce qui le rend plus adapté aux applications à charge moyenne à faible. Nous proposons également des services de personnalisation adaptés aux exigences spécifiques des clients.
Module d’articulation planétaire compact, léger, résistant aux impacts et à grande vitesseLe module d’articulation planétaire standard est un composant central des systèmes de puissance robotisés. Grâce à une conception hautement intégrée combinant un réducteur planétaire, un moteur couple sans carcasse, un frein, un encodeur et un variateur, il permet une optimisation significative du volume et du poids, assurant un contrôle précis du mouvement de l’articulation. Il en résulte un couple plus élevé, une taille plus compacte et un poids plus léger. Comparé aux modules d’articulation harmoniques, le module d’articulation planétaire présente un rapport de réduction plus faible, une vitesse de sortie plus élevée et une densité de couple supérieure, ce qui le rend plus adapté aux applications à charge moyenne à faible. Nous proposons également des services de personnalisation adaptés aux exigences spécifiques des clients.
Avec des avantages clés tels que des performances à grande vitesse, une résistance aux chocs et une conception compacte et légère, le module d’articulation planétaire standard est devenu la solution privilégiée pour les entraînements à forte charge dans les robots humanoïdes, les robots spécialisés, les AGV logistiques et l’automatisation industrielle, favorisant les progrès des performances robotiques et des scénarios d’application plus larges.Détails



Moteur à couple sans cadre
Le moteur couple sans cadre, un type spécialisé de moteur synchrone à aimants permanents (PMSM), se compose de deux composants centraux: le rotor et le stator, tout en éliminant les structures de moteur traditionnelles telles que les carters, les roulements et les arbres. Conçu pour une intégration directe dans le système mécanique du client, il exige que l'utilisateur final fournisse les roulements de support et les enveloppes. Cette philosophie de conception offre une flexibilité plus élevée, des dimensions plus compactes et des performances supérieures, ce qui le rend idéal pour les applications ayant des exigences strictes en matière d'espace, de poids et de capacités dynamiques. Il excelle dans les scénarios de haute précision et de réponse dynamique élevée, notamment l'actionnement des articulations de robots humanoïdes, les plateaux rotatifs de précision, les équipements médicaux et les systèmes d'automatisation industrielle.Les moteurs couple sans cadre sont en outre classés en moteurs sans cadre à rotor interne et moteurs sans cadre à rotor externe, selon leur configuration structurelle.
 Moteurs sans carcasse à haute densité de couple pour la robotique FM2Les moteurs couple sans carcasse HONPINE FM2 pour la robotique offrent des performances supérieures et davantage d'options de configuration par rapport à la série FM1, ce qui les rend adaptés à une gamme d'applications plus large. Les pertes du moteur sont réduites de 20%, tandis que le couple de sortie est augmenté de 10% par rapport aux moteurs FM1, ce qui prolonge l'endurance de fonctionnement.
Moteurs sans carcasse à haute densité de couple pour la robotique FM2Les moteurs couple sans carcasse HONPINE FM2 pour la robotique offrent des performances supérieures et davantage d'options de configuration par rapport à la série FM1, ce qui les rend adaptés à une gamme d'applications plus large. Les pertes du moteur sont réduites de 20%, tandis que le couple de sortie est augmenté de 10% par rapport aux moteurs FM1, ce qui prolonge l'endurance de fonctionnement.
La série FM2 est disponible en six diamètres allant de φ50mm à φ127mm, avec des vitesses nominales de 1800 rpm à 5500 rpm, un couple allant de 0.36 Nm à 6.40 Nm, et une puissance de sortie de 207 W à 608 W. Les tensions nominales vont de 24 V à 70 V. Les configurations optionnelles incluent des capteurs Hall, des capteurs de température, et des options de fils de sortie personnalisables.Ces moteurs sont largement utilisés dans les robots collaboratifs, les robots humanoïdes, les robots quadrupèdes, les robots industriels, et les robots de rééducation médicale.Détails sans cadre FM1 économiques") Moteurs CC sans balais (BLDC) sans cadre FM1 économiquesLes moteurs CC sans balais (BLDC) sans cadre HONPINE FM1 sont des produits compacts, hautes performances et économiques. Disponibles en quatre tailles (φ50mm–φ115mm), avec des vitesses nominales allant de 650 rpm à 5250 rpm, un couple de 0.3 Nm à 9.32 Nm, et une puissance de 165 W à 920 W. Les tensions nominales vont de 24 V à 70 V, avec des capteurs Hall, des capteurs de température et des configurations de câblage en option. Ils sont largement utilisés dans les robots collaboratifs, les robots humanoïdes, les robots quadrupèdes, et les robots de rééducation médicale.Détails
Moteurs CC sans balais (BLDC) sans cadre FM1 économiquesLes moteurs CC sans balais (BLDC) sans cadre HONPINE FM1 sont des produits compacts, hautes performances et économiques. Disponibles en quatre tailles (φ50mm–φ115mm), avec des vitesses nominales allant de 650 rpm à 5250 rpm, un couple de 0.3 Nm à 9.32 Nm, et une puissance de 165 W à 920 W. Les tensions nominales vont de 24 V à 70 V, avec des capteurs Hall, des capteurs de température et des configurations de câblage en option. Ils sont largement utilisés dans les robots collaboratifs, les robots humanoïdes, les robots quadrupèdes, et les robots de rééducation médicale.Détails Moteurs couple sans carcasse hautement intégrés pour articulations de robots FMKLes moteurs couple sans carcasse, contrairement aux servomoteurs traditionnels, se composent uniquement d’éléments de stator et de rotor. Par rapport aux moteurs avec carcasse, les moteurs sans carcasse offrent une configuration flexible et une installation facile. Compte tenu de la tendance croissante vers des systèmes d’entraînement hautement intégrés, les moteurs sans carcasse répondent mieux aux attentes des ingénieurs. Les ingénieurs n’ont plus besoin de tenir compte des interfaces moteur dans la conception du système, ce qui permet de réduire au maximum l’espace occupé par l’unité de sortie de puissance dans le système d’entraînement, conduisant à une intégration plus élevée du système.Les moteurs couple sans carcasse HONPINE FMK sont désormais largement utilisés dans les articulations J1–J6 des robots collaboratifs et à double bras, les articulations de marche des robots quadrupèdes et les articulations flexibles des robots humanoïdes.Détails
Moteurs couple sans carcasse hautement intégrés pour articulations de robots FMKLes moteurs couple sans carcasse, contrairement aux servomoteurs traditionnels, se composent uniquement d’éléments de stator et de rotor. Par rapport aux moteurs avec carcasse, les moteurs sans carcasse offrent une configuration flexible et une installation facile. Compte tenu de la tendance croissante vers des systèmes d’entraînement hautement intégrés, les moteurs sans carcasse répondent mieux aux attentes des ingénieurs. Les ingénieurs n’ont plus besoin de tenir compte des interfaces moteur dans la conception du système, ce qui permet de réduire au maximum l’espace occupé par l’unité de sortie de puissance dans le système d’entraînement, conduisant à une intégration plus élevée du système.Les moteurs couple sans carcasse HONPINE FMK sont désormais largement utilisés dans les articulations J1–J6 des robots collaboratifs et à double bras, les articulations de marche des robots quadrupèdes et les articulations flexibles des robots humanoïdes.Détails Moteur de couple sans cadre à rotor interne compact, léger et à haute densité de puissanceLe moteur de couple sans cadre à rotor interne est un type spécialisé de moteur synchrone à aimants permanents (PMSM) composé de deux éléments principaux : le rotor et le stator. Le rotor est positionné à l'intérieur, tandis que le stator est monté à l'extérieur. Sa conception innovante élimine les carter, roulements et arbres traditionnels des moteurs, ne conservant que les ensembles rotor et stator. Le rotor adopte généralement une structure annulaire intégrée avec des aimants permanents, montée directement sur l'arbre de charge. Le stator est constitué de bobinages en cuivre et de tôles magnétiques, générant des forces électromagnétiques pour entraîner la rotation du rotor. Cette configuration permet une transmission de couple efficace via l'interaction des champs magnétiques, idéale pour des applications de haute précision comme les articulations robotiques et l'automatisation industrielle. Elle permet d'entraîner directement la charge, minimisant les pertes de transmission mécanique.Détails
Moteur de couple sans cadre à rotor interne compact, léger et à haute densité de puissanceLe moteur de couple sans cadre à rotor interne est un type spécialisé de moteur synchrone à aimants permanents (PMSM) composé de deux éléments principaux : le rotor et le stator. Le rotor est positionné à l'intérieur, tandis que le stator est monté à l'extérieur. Sa conception innovante élimine les carter, roulements et arbres traditionnels des moteurs, ne conservant que les ensembles rotor et stator. Le rotor adopte généralement une structure annulaire intégrée avec des aimants permanents, montée directement sur l'arbre de charge. Le stator est constitué de bobinages en cuivre et de tôles magnétiques, générant des forces électromagnétiques pour entraîner la rotation du rotor. Cette configuration permet une transmission de couple efficace via l'interaction des champs magnétiques, idéale pour des applications de haute précision comme les articulations robotiques et l'automatisation industrielle. Elle permet d'entraîner directement la charge, minimisant les pertes de transmission mécanique.Détails

 sans cadre FM1 économiques")


Qu'est-ce qu'un moteur de joint robot à transmission harmonique?
Le moteur de joint harmonique permet un contrôle de mouvement de haute précision grâce à des composants intégrés comprenant une transmission harmonique, un moteur couple sans cadre, un frein, un encodeur et une unité d'entraînement, avec une taille et un poids optimisés.Le moteur de joint harmonique HONPINE offre des options de configuration flexibles pour répondre à divers besoins d'application, notamment des doubles encodeurs, le STO (Safe Torque Off), des freins de maintien et des capteurs de couple intégrés.

Sélection d'actionneur de joint robot à transmission harmonique
Afin de répondre aux diverses demandes du marché, les moteurs de joint robot à transmission harmonique HONPINE sont actuellement divisés en trois séries principales: HPJM, TCHL et HAG.
Ce guide fournit un aperçu initial pour vous aider à sélectionner l'actionneur le plus adapté à votre application en fonction de facteurs tels que le contrôle des coûts, le délai de livraison et les exigences de performance de base.
Pour une sélection détaillée et une assistance technique, n'hésitez pas à nous contacter pour en discuter davantage.
Caractéristiques clés
Cette série est sur le marché depuis plus de 5 ans, offrant une solution de joint de robot humanoïde pleinement développée et mature. Elle intègre un réducteur harmonique, un variateur, un encodeur et un moteur couple sans cadre. Des options de doubles encodeurs et de frein sont disponibles. Prend en charge les protocoles de communication CAN (propriétaire), CANopen et EtherCAT.
Avantages clés
Conception hautement compacte, permettant plus d'espace pour l'intégration du système à exigences de performance équivalentes
Graisse basse température en option, adaptée aux environnements sévères jusqu'à -40°C
Délai moyen ≤ 4 semaines, garantissant une forte capacité de production
Applications
Idéal pour les projets nécessitant des performances stables et fiables, une livraison rapide en lots ou un fonctionnement dans des environnements à basse température.
Remarques
Cette série n'a pas été initialement conçue avec des capteurs de couple ni une étanchéité. Une personnalisation est disponible si de telles fonctions sont requises, mais un coût supplémentaire et un délai plus long sont à prévoir.
Caractéristiques clés
Cette nouvelle série, qui sera lancée à la fin de 2025, adopte un réducteur harmonique développé en interne, permettant un meilleur contrôle des coûts. Elle est livrée en standard avec des doubles encodeurs (absolus monotour, résolution de 23-bit) et prend en charge les protocoles de communication CAN FD et EtherCAT. Les fonctions optionnelles comprennent un frein et un capteur de couple. Le faisceau de bornes intégré prend en charge le passage des câbles dans l'arbre creux et la mise en cascade des modules.
Avantages clés
Avantage significatif en termes de coût
Prend en charge des configurations de montage avant, latéral et arrière, offrant une grande flexibilité structurelle
La conception du faisceau facilite l'intégration du système
Applications
Idéal pour les projets sensibles aux coûts avec des exigences élevées en matière de flexibilité d'installation.
Remarques
Actuellement, seul un rapport de transmission de 101 est disponible. La gamme complète des rapports de transmission devrait être lancée en June 2026. Le délai actuel est d'environ 6 semaines.
Caractéristiques clés
Lancée en 2026, cette nouvelle série est équipée de la fonction STO (Safe Torque Off) pour répondre à des exigences de sécurité spécifiques. Elle adopte des réducteurs harmoniques de grandes marques nationales, garantissant une haute fiabilité du produit. Prend en charge les protocoles de communication CANopen et EtherCAT, avec frein et capteur de couple en option.
Avantages clés
Répond à des normes de sécurité plus élevées
Excellentes performances et qualité fiable des composants centraux du réducteur
Applications
Idéal pour les projets avec des exigences de sécurité claires ou lorsque la fiabilité du réducteur est une priorité absolue.
Remarques
En tant que série nouvellement lancée, la capacité de production est encore en cours de montée en puissance. Le délai actuel est d'environ 8–10 semaines.
Solutions et applications de moteurs de joint robot
Pendant de nombreuses années, HONPINE a appliqué les moteurs de joint robot harmonique et les moteurs de joint planétaire à divers domaines, notamment les robots humanoïdes, les robots à deux bras, les robots à roues, les drones, les machines agricoles, les équipements nucléaires, les robots industriels et les équipements d'automatisation industrielle, en fournissant des solutions de moteurs de joint et en prenant en charge la personnalisation pour ces secteurs. Ses séries HPJM, TCHL, HAG et autres de moteurs de joint robot sont développées sur la base de l'expérience acquise dans le cadre de services pratiques.
‹







›

Quels sont les avantages et les inconvénients du moteur de joint harmonique
Avantages des moteurs de joint harmonique
Précision ultra-élevée
Jeu de transmission minimal avec une haute précision de répétabilité de positionnement allant jusqu'à ±0.01 mm, ce qui le rend essentiel pour les opérations robotiques de précision.
Rapport de réduction élevé
Un grand rapport de réduction à un seul étage permet une sortie de couple élevée à partir d'une taille compacte, atteignant efficacement des performances de “basse vitesse, forte charge”.

Conception extrêmement compacte
Structure simple, petite taille et construction légère, ce qui le rend très adapté aux pièces robotiques à espace contraint telles que les poignets et les mains.
Capacité d'intégration élevée
Souvent vendu sous forme de modules intégrés combinant moteurs, encodeurs et autres composants, permettant une installation et une maintenance pratiques tout en prenant en charge une conception modulaire.
Inconvénients des moteurs de joint harmonique
Le réducteur harmonique et le capteur de couple du moteur d'articulation harmonique sont développés sur mesure, ce qui rend la réduction du prix difficile. Cependant, dans un avenir proche, lorsque la demande et la capacité de production atteindront un certain niveau, le prix pourra être réduit.
Module d’articulation robot à transmission harmonique - FAQ
Les moteurs de joint DC harmoniques HONPINE sont des actionneurs harmoniques spécialement conçus pour l'intelligence incarnée. hpjm a été le premier actionneur harmonique à être lancé, et affiche actuellement les performances les plus stables et le délai de livraison le plus rapide. Afin de répondre aux besoins des clients, nous avons récemment lancé deux nouveaux moteurs de joint DC harmoniques: TCHL et HAG. Contactez-nous pour obtenir les dernières brochures produits.
Un module d'articulation robotique est une unité de commande de mouvement hautement intégrée qui combine un moteur d'articulation, un réducteur harmonique, un servomoteur, deux codeurs, un frein et des capteurs au sein d'un système d'actionnement compact. Également appelé actionneur d'articulation ou actionneur harmonique, il détermine directement la précision des mouvements, le couple, la réponse dynamique et la fiabilité globale du robot. Pour les robots humanoïdes, les robots collaboratifs, les robots quadrupèdes et les systèmes d'automatisation industrielle, la qualité du module d'actionnement harmonique a un impact significatif sur les performances globales du robot. Un robot humanoïde typique peut nécessiter plus de 30 actionneurs d'articulation, faisant des modules d'articulation l'un des composants les plus précieux et critiques du robot.
Le routage de câbles à arbre creux est une conception structurelle qui permet aux câbles d'alimentation, aux fils d'encodeur et aux câbles de communication de passer directement par le centre de l'actionneur d'articulation du robot au lieu d'être acheminés à l'extérieur.
Cette conception offre plusieurs avantages importants :
Élimine la torsion et l'emmêlement des câbles
Protège les câbles contre l'usure et les dommages mécaniques
Permet une rotation continue de l'articulation sans interférence des câbles
Améliore la fiabilité du robot et simplifie la maintenance
Crée une conception de robot plus propre et plus compacte
Pour les robots humanoïdes, les robots collaboratifs et les robots quadrupèdes, la technologie à arbre creux est devenue une caractéristique importante des modules d'entraînement harmonique haute performance et des moteurs avancés d'articulation de robot.
Les modules d'entraînement harmonique HPJM utilisent une approche de sécurité différente. Au lieu du STO, nous intégrons un système de frein électromagnétique intégré fiable qui s'enclenche automatiquement pour arrêter la rotation immédiatement lorsque l'alimentation est coupée, garantissant ainsi un fonctionnement sûr.
Le nouveau moteur d'articulation robotique à entraînement harmonique HONPINE HAG 2026 dispose d'une fonction STO. Contactez-nous pour obtenir plus d'informations sur la série HAG.
Non.
L’arbre creux est une caractéristique structurelle soigneusement conçue plutôt qu’un compromis en termes de résistance. Les actionneurs modernes d’articulation de robot sont conçus à l’aide d’une analyse par éléments finis (FEA) avancée et d’une ingénierie structurelle optimisée afin de maintenir une rigidité élevée tout en permettant le passage interne des câbles.
La conception creuse permet un câblage plus propre et une plus grande flexibilité d’installation sans réduire le couple nominal ni la capacité de charge de l’actionneur.
Ainsi, les actionneurs harmoniques, les moteurs harmoniques et les modules d’articulation de robot haute performance d’aujourd’hui combinent une construction légère, une excellente rigidité et une résistance mécanique fiable, ce qui les rend adaptés aux robots humanoïdes, aux robots industriels, aux robots collaboratifs et à d’autres systèmes robotiques de précision.
Avec l'expansion continue des capacités de fabrication à grande échelle et l'innovation technologique continue, HONPINE vise non seulement à fournir des produits fiables, reproductibles en grande série et rentables, mais aussi à accélérer l'industrialisation des robots humanoïdes et des robots à intelligence incarnée.
Les moteurs de joint harmonique HONPINE se caractérisent par :
Couple de sortie élevé
Haute précision
Rapport de réduction élevé
Structure compacte
Faible bruit
Faibles vibrations
Ils conviennent particulièrement aux articulations de bras robotisés, où des exigences extrêmement élevées en matière de précision, de contrôle de la force et de conception légère sont essentielles.
Pour la plupart des modèles, HONPINE peut maîtriser le délai de livraison dans un délai d'un mois. Une petite partie des produits peut être en cours de planification de production en raison d'une forte hausse de la demande de commandes. Nous continuons à étendre notre échelle de production afin d'augmenter la capacité.
Lors du choix d'un actionneur pour articulation de robot, plusieurs indicateurs clés de performance doivent être pris en compte : Densité de couple : Un moteur d'articulation de robot de haute qualité doit fournir un couple de sortie élevé dans une conception compacte et légère, optimisant ainsi l'efficacité et la capacité de charge du robot. Précision de positionnement : Un faible jeu et une excellente répétabilité sont essentiels pour les tâches de précision telles que l'assemblage, l'inspection et la robotique médicale. Un actionneur harmonique haut de gamme assure un mouvement fluide et un positionnement très précis. Durée de vie : Une longue durée de vie et des performances constantes sont indispensables pour les robots industriels fonctionnant en continu dans des environnements exigeants. Performances thermiques : Un module d'entraînement harmonique efficace doit maintenir des températures de fonctionnement stables en fonctionnement continu, contribuant ainsi à préserver la précision et à prolonger la durée de vie des composants. En évaluant ces quatre facteurs conjointement, les utilisateurs peuvent identifier un actionneur d'articulation de robot fiable, adapté aux applications robotiques de longue durée.
Oui. Il utilise un encodeur absolu multitour. Cependant, en raison d'un réducteur à la sortie, une batterie d'encodeur est nécessaire pour conserver le comptage de position multitour. La personnalisation est prise en charge, offrant l'option d'avoir le moteur avec ou sans la batterie d'encodeur.
Un actionneur d'articulation robotique est une unité intégrée de contrôle de mouvement qui combine un réducteur harmonique, un servomoteur, un codeur, un frein, un contrôleur et des roulements de précision dans un module compact. Également appelé actionneur intégré à réducteur harmonique, module d'articulation d'entraînement robotique, articulation robotique intégrée ou module d'actionneur rotatif robotique, il constitue le système central de transmission de puissance des robots modernes.
Grâce à son architecture modulaire, plusieurs modules d'articulation à engrenage harmonique peuvent être combinés pour construire des bras robotiques à plusieurs degrés de liberté, des robots humanoïdes, des exosquelettes, des robots de service et des équipements d'automatisation sur mesure.
Les petits modèles sont largement utilisés dans:Nacelles de caméra,drones et aéronefs sans pilote,robots d'inspection,dispositifs médicaux
Les grands modèles sont idéaux pour:Bras robotiques industriels,robots humanoïdes,robots collaboratifs,robots mobiles,robots logistiques
,robots à usage spécial,équipements d'automatisation CNC
Le développement rapide des robots humanoïdes stimule l'innovation continue dans les articulations robotiques harmoniques et les actionneurs d'articulations robotisées. En tant qu'unités de mouvement essentielles pour les épaules, les coudes, les poignets, la taille et les jambes des robots, les systèmes modernes d'actionneurs harmoniques deviennent plus légers, plus compacts et plus puissants. Les conceptions avancées améliorent la densité de couple, la précision de positionnement et les performances de mouvement tout en réduisant le poids et l'espace d'installation. Parallèlement, les profils d'engrenages optimisés, les matériaux à haute résistance, ainsi que l'amélioration de la lubrification, de l'étanchéité et de la gestion thermique renforcent la durabilité, la résistance aux chocs et la durée de vie. Ces avancées permettent aux robots humanoïdes d'effectuer des mouvements plus précis, plus fiables et plus proches de ceux de l'humain dans les applications industrielles, de service et de recherche.
Haute précision L’engrènement multi-dents répartit les erreurs de transmission, offrant une excellente précision de positionnement et un jeu extrêmement faible.
Rapport de réduction élevé Les rapports de réduction à un étage varient généralement de 30:1 à 320:1, avec des conceptions personnalisées dépassant 1000:1.
Format compact Par rapport aux réducteurs conventionnels, un module d’articulation robotique compact offre des dimensions nettement plus réduites tout en maintenant un couple de sortie équivalent.
Forte intégration Une articulation intégrée à entraînement harmonique combine moteur, réducteur, codeur, frein et contrôleur dans un ensemble compact, simplifiant l’installation.
Mouvement fluide La faible vitesse de glissement des dents minimise les vibrations et les impacts tout en maintenant des rendements de transmission entre 69% et 96%.
Bien que les actionneurs à transmission harmonique offrent une précision exceptionnelle, ils présentent également certaines limites d’ingénierie.
Résistance limitée aux chocs
Le flexspline subit en permanence une déformation élastique, ce qui rend les transmissions harmoniques moins adaptées aux applications impliquant des impacts fréquents, telles que les sauts, la course ou les chutes de robots.
Rigidité torsionnelle plus faible
Par rapport aux réducteurs planétaires ou aux réducteurs RV, les transmissions harmoniques présentent généralement une rigidité torsionnelle plus faible.
Défis liés à la gestion thermique
Les conceptions d’actionneurs hautement intégrées réduisent l’espace disponible pour la dissipation de la chaleur, nécessitant des stratégies de refroidissement optimisées.
Contraintes de rapport de réduction
Les transmissions harmoniques ne sont généralement pas recommandées pour les applications nécessitant des rapports de réduction inférieurs à environ 35:1.
Bien que les actionneurs à transmission harmonique offrent une précision exceptionnelle, ils présentent également certaines limites d’ingénierie.
Résistance limitée aux chocs
Le flexspline subit en permanence une déformation élastique, ce qui rend les transmissions harmoniques moins adaptées aux applications impliquant des impacts fréquents, telles que les sauts, la course ou les chutes de robots.
Rigidité torsionnelle plus faible
Par rapport aux réducteurs planétaires ou aux réducteurs RV, les transmissions harmoniques présentent généralement une rigidité torsionnelle plus faible.
Défis liés à la gestion thermique
Les conceptions d’actionneurs hautement intégrées réduisent l’espace disponible pour la dissipation de la chaleur, nécessitant des stratégies de refroidissement optimisées.
Contraintes de rapport de réduction
Les transmissions harmoniques ne sont généralement pas recommandées pour les applications nécessitant des rapports de réduction inférieurs à environ 35:1.
Nos modules d'entraînement harmonique sont dotés d'un encodeur haute précision de 16 bits, offrant une résolution de 65 536 positions discrètes par tour. Cela signifie que la rotation complète de 360° est divisée en incréments extrêmement fins pour une précision positionnelle exceptionnelle à l'extrémité du moteur.
Bien que les modules standard de joint de robot HONPINE ne comprennent pas de mesure de couple intégrée, nous pouvons répondre aux exigences de détection de couple en intégrant un capteur de couple externe. Veuillez contacter notre équipe technique pour des solutions personnalisées.
En raison de la conception très compacte de notre système d'entraînement intégré, les modules d'articulation de robot actuels de HONPINE n'incluent pas de broches d'E/S à usage général. Cette conception rationalisée permet une optimisation de l'espace dans les applications robotiques.
Les spécifications mécaniques complètes, y compris la masse et le volume pour toutes les variantes de modules, sont disponibles dans notre brochure de sélection de modèles. Téléchargez la brochure dans notre section ressources ou contactez notre équipe commerciale pour des exigences dimensionnelles spécifiques.
Le moteur articulé HONPINE utilise un encodeur magnétique avec une résolution de 65 536 unités par tour.
Oui. Il utilise un encodeur absolu multitour. Cependant, en raison d'un réducteur à la sortie, une batterie d'encodeur est nécessaire pour conserver le comptage de position multitour. La personnalisation est prise en charge, offrant l'option d'avoir le moteur avec ou sans la batterie d'encodeur.
Sur la base du protocole CAN, un seul moteur nécessite 0,5 ms pour chaque transmission et réception. Pour plusieurs moteurs, ce temps s'accumule en conséquence.
En substance, un contrôleur principal peut gérer quatre modules. Bien que le cycle de communication normal soit de 0,5 ms par transmission, il ne maintient pas systématiquement cet intervalle—par exemple, un échantillonnage à haute fréquence n'est pas nécessaire pendant les états d'alarme ou des conditions similaires.
Un module d'articulation harmonique permet un contrôle précis de la position et du couple pour les articulations de robot grâce au rapport de réduction élevé (généralement 50–160:1) et au faible jeu (moins de 1 minute d'arc) du réducteur harmonique.
De plus, le module intègre des codeurs et des capteurs de couple, permettant un ajustement en temps réel du couple avec une précision de ±0,1 N·m, ce qui le rend parfaitement adapté aux tâches d'assemblage flexibles et conformes.
Un module d'articulation harmonique prend en charge le mouvement de rotation des articulations robotiques et atteint une précision de répétition de positionnement allant jusqu'à ±0,001°.
Il offre une densité de couple élevée (>100 N·m/kg) dans un espace compact, ce qui le rend idéal pour des applications telles que :
Articulations de robots humanoïdes
Robots de soudage et de manutention
Machines médicales
Équipements d'automatisation industrielle
Systèmes d'entraînement électrique
Robots de service et autres systèmes robotiques
La conception à arbre creux permet aux câbles, lignes pneumatiques ou fils de signal de passer par le centre, réduisant le diamètre du joint et rendant le routage des câbles plus simple et plus fiable. Cela réduit considérablement la complexité du câblage et améliore l'intégration globale du système dans les applications robotiques.
Les moteurs de joint harmonique HONPINE se caractérisent par :
Couple de sortie élevé
Haute précision
Rapport de réduction élevé
Structure compacte
Faible bruit
Faibles vibrations
Ils conviennent particulièrement aux articulations de bras robotisés, où des exigences extrêmement élevées en matière de précision, de contrôle de la force et de conception légère sont essentielles.
Avec l'expansion continue des capacités de fabrication à grande échelle et l'innovation technologique continue, HONPINE vise non seulement à fournir des produits fiables, reproductibles en grande série et rentables, mais aussi à accélérer l'industrialisation des robots humanoïdes et des robots à intelligence incarnée.
La sélection d’un module d’actionneur robotique à réducteur harmonique nécessite d’évaluer des facteurs de performance clés, notamment la densité de couple, la répétabilité, l’architecture de commande, la conception mécanique, la capacité de communication et la fiabilité environnementale. Une densité de couple élevée améliore la capacité de charge utile tout en réduisant le poids global du système, et les applications de précision exigent généralement des niveaux de répétabilité allant jusqu’à ≤15–20 secondes d’arc. Les modules avancés adoptent souvent une commande en boucle fermée à double codeur absolu afin de compenser le jeu et les erreurs de transmission, améliorant ainsi la précision du mouvement. Les structures à arbre creux permettent le routage interne des câbles pour une meilleure intégration et une fiabilité accrue. Les protocoles de communication industriels tels qu’EtherCAT et CAN FD, associés à une commande servo haute fréquence, garantissent des performances rapides et stables. En outre, les systèmes d’actionneurs fiables doivent réussir des tests rigoureux portant sur la plage de température, la durée de vie en fatigue, la surcharge, les chocs, les vibrations et la protection IP afin d’assurer une stabilité industrielle à long terme.
Les dernières technologies d’actionneurs harmoniques pour robots se concentrent sur trois grands axes de développement.
Structures intégrées légères
Grâce à l’utilisation d’alliages de magnésium, de boîtiers légers et d’agencements mécaniques optimisés, les fabricants continuent de réduire le poids tout en raccourcissant la longueur des actionneurs.
Précision accrue et densité de puissance plus élevée
Les améliorations continues de la conception des moteurs, des réducteurs harmoniques, de la résolution des codeurs et des algorithmes d’asservissement augmentent la densité de couple, la précision de positionnement et la réponse dynamique.
Fiabilité améliorée
Les progrès réalisés dans les matériaux des flexsplines, l’optimisation des profils de denture, le traitement thermique, les technologies d’étanchéité et les systèmes de lubrification améliorent considérablement la durabilité dans des conditions industrielles exigeantes.
Malgré la concurrence croissante des systèmes d'engrenages planétaires et des réducteurs RV, les systèmes d'actionneurs de précision à entraînement harmonique restent difficiles à remplacer dans les applications exigeant :
Jeu nul ou ultra-faible
Haute précision de positionnement
Conception intégrée compacte
Articulations robotiques légères
À mesure que les robots humanoïdes exigent une plus grande résistance aux chocs pour les articulations du bas du corps, les réducteurs planétaires deviennent plus courants dans les hanches et les jambes. Cependant, les modules robotiques à entraînement harmonique continuent de dominer les applications sensibles à la précision, telles que les bras robotiques, les poignets, les robots collaboratifs, les robots médicaux et les robots de service.
Plutôt qu'une technologie en remplace une autre, l'industrie évolue vers une sélection de transmissions spécifique à chaque application, où les solutions harmoniques, planétaires et RV coexistent afin d'optimiser les performances pour différents systèmes robotiques.
Paramètres clés
Résolution 16 bits : 65 536 impulsions par tour de moteur.
Rapport de réduction : par exemple, 101:1 signifie que la sortie effectue un tour pour chaque 101 tours du moteur.
Vitesse de sortie
Vitesse de sortie = vitesse du moteur ÷ rapport de réduction.
Exemple : moteur à 1 tour/sec (65 536 impulsions/sec) avec un rapport 101:1 → la sortie effectue 1 tour en 101 secondes.
Conversion d'unités
Conversions rad/s :
1 rad/s ≈ 57,3 °/s
1 rad/s ≈ 9,55 tr/min
Impulsions/sec ↔ tr/min (encodeur 16 bits) :
1 tr/min ≈ 1092,27 impulsions/sec
1 impulsion/sec ≈ 1/1092,27 tr/min
Remarque : Les calculs sont basés sur des relations physiques. Par exemple, 1 rad/s = 60/(2π) tr/min.
Moteur de joint planétaire - FAQ
Le moteur de joint planétaire JRM est un produit de qualité militaire de HONPINE, couramment utilisé dans les chiens robots haute performance. Actuellement, pour la bionique des robots humanoïdes, le moteur de joint harmonique HPJM est sur le point d'être lancé, avec une conception plus compacte et une cavité creuse plus grande.
Le choix dépend de l'application de votre robot plutôt que de la technologie « meilleure ». Modules d'articulation harmonique : Un module d'articulation harmonique utilise un réducteur harmonique pour obtenir : un jeu quasi nul, une précision de positionnement extrêmement élevée, un contrôle de mouvement fluide et une conception compacte et légère. Ces caractéristiques rendent les actionneurs harmoniques idéaux pour : les bras de robots humanoïdes, les robots collaboratifs, les robots médicaux, l'automatisation de précision et les applications à contrôle de force. Modules d'articulation planétaire : Un actionneur d'articulation robotique planétaire offre : une rigidité structurelle supérieure, une meilleure résistance aux chocs, une capacité de couple plus élevée et un excellent rapport coût-performance. Les actionneurs planétaires sont couramment utilisés pour : les jambes de robots, les articulations de la taille, l'automatisation intensive, les robots mobiles et les applications à fort impact. De nombreux robots avancés combinent les deux technologies, utilisant des modules d'entraînement harmonique lorsque la précision est essentielle et des actionneurs planétaires lorsque la rigidité et la capacité de charge sont plus élevées.
Les engrenages internes du moteur à engrenages planétaires HONPINE sont fabriqués en acier allié à haute résistance, traités par cémentation et trempe, atteignant une dureté de surface de HRC 58–62. Associée à une graisse lubrifiante de qualité alimentaire, la durée de vie dépasse 10,000 heures dans des conditions de fonctionnement nominales, ce qui équivaut à environ 14 mois de fonctionnement industriel continu sans remplacer les composants principaux.
En outre, le moteur présente une conception d'étanchéité modulaire avec un indice de protection IP65, résistant efficacement à la poussière et aux éclaboussures de liquide, ce qui le rend adapté à des environnements spéciaux tels que la transformation alimentaire et la peinture automobile.
Les interfaces standardisées et la conception détachable du capot d'extrémité permettent la maintenance sans démonter l'ensemble du robot—les modules peuvent être remplacés directement, réduisant considérablement les temps d'arrêt et les coûts de maintenance.
Des applications industrielles telles que le tri par robot SCARA et le chargement et déchargement par bras robotique à six axes, aux applications médicales incluant les équipements d'entraînement à la rééducation et le contrôle de précision des robots chirurgicaux, et plus loin vers les marchés grand public tels que la simulation de la démarche des robots bioniques et la stabilisation de cardan des UAV, le module prend en charge plusieurs protocoles de communication, notamment CAN et RS485, permettant une compatibilité rapide avec les systèmes de contrôle de différentes marques.
Plus important encore, la combinaison d'une conception légère et d'une densité de couple élevée crée une forte polyvalence d'application :
Les modèles de petite taille peuvent être intégrés dans des cardans de UAV, garantissant une rotation fluide à 360° sans augmenter la charge utile.
Les modèles plus grands peuvent être intégrés dans des roues motrices d'AGV, prenant en charge un fonctionnement continu de 24 heures pour répondre aux exigences des opérations d'entreposage et de logistique ininterrompues.
Pour répondre aux exigences strictes de précision de la fabrication industrielle, le module adopte une structure de réduction à engrenages planétaires hélicoïdaux. Grâce à une conception optimisée de la surface des dents, le jeu d'engrenage est contrôlé dans 10 arcminutes (approximately 0.167°), atteignant une précision de positionnement répétée de ±12 arcminutes.
Combiné à un signal de commande haute fréquence de 3 kHz et à un temps de réponse de ≤200 μs, le système évite les pertes de produits causées par des retards ou des erreurs de positionnement, même dans des opérations au niveau du micron telles que l'assemblage de composants électroniques de précision et le soudage des languettes de batteries au lithium.
Pour les applications à charge élevée, le module utilise des matériaux d'engrenage renforcés de qualité militaire et des structures de roulement. Le couple de crête atteint jusqu'à 36 Nm, tandis que le couple de décrochage dépasse 24 Nm, équivalent à soulever de manière stable une charge de 3.6 kg. Cela fournit une puissance forte et fiable pour la locomotion porteuse de charge dans les robots quadrupèdes et l'assistance à la rééducation dans les robots exosquelettes.
Pour répondre aux exigences strictes de précision de la fabrication industrielle, le module adopte une structure de réduction à engrenages planétaires hélicoïdaux. Grâce à une conception optimisée de la surface des dents, le jeu d'engrenage est contrôlé dans 10 arcminutes (approximately 0.167°), atteignant une précision de positionnement répétée de ±12 arcminutes.
Combiné à un signal de commande haute fréquence de 3 kHz et à un temps de réponse de ≤200 μs, le système évite les pertes de produits causées par des retards ou des erreurs de positionnement, même dans des opérations au niveau du micron telles que l'assemblage de composants électroniques de précision et le soudage des languettes de batteries au lithium.
Pour les applications à charge élevée, le module utilise des matériaux d'engrenage renforcés de qualité militaire et des structures de roulement. Le couple de crête atteint jusqu'à 36 Nm, tandis que le couple de décrochage dépasse 24 Nm, équivalent à soulever de manière stable une charge de 3.6 kg. Cela fournit une puissance forte et fiable pour la locomotion porteuse de charge dans les robots quadrupèdes et l'assistance à la rééducation dans les robots exosquelettes.
Des applications industrielles telles que le tri par robot SCARA et le chargement et déchargement par bras robotique à six axes, aux applications médicales incluant les équipements d'entraînement à la rééducation et le contrôle de précision des robots chirurgicaux, et plus loin vers les marchés grand public tels que la simulation de la démarche des robots bioniques et la stabilisation de cardan des UAV, le module prend en charge plusieurs protocoles de communication, notamment CAN et RS485, permettant une compatibilité rapide avec les systèmes de contrôle de différentes marques.
Plus important encore, la combinaison d'une conception légère et d'une densité de couple élevée crée une forte polyvalence d'application :
Les modèles de petite taille peuvent être intégrés dans des cardans de UAV, garantissant une rotation fluide à 360° sans augmenter la charge utile.
Les modèles plus grands peuvent être intégrés dans des roues motrices d'AGV, prenant en charge un fonctionnement continu de 24 heures pour répondre aux exigences des opérations d'entreposage et de logistique ininterrompues.
Les engrenages internes du moteur à engrenages planétaires HONPINE sont fabriqués en acier allié à haute résistance, traités par cémentation et trempe, atteignant une dureté de surface de HRC 58–62. Associée à une graisse lubrifiante de qualité alimentaire, la durée de vie dépasse 10,000 heures dans des conditions de fonctionnement nominales, ce qui équivaut à environ 14 mois de fonctionnement industriel continu sans remplacer les composants principaux.
En outre, le moteur présente une conception d'étanchéité modulaire avec un indice de protection IP65, résistant efficacement à la poussière et aux éclaboussures de liquide, ce qui le rend adapté à des environnements spéciaux tels que la transformation alimentaire et la peinture automobile.
Les interfaces standardisées et la conception détachable du capot d'extrémité permettent la maintenance sans démonter l'ensemble du robot—les modules peuvent être remplacés directement, réduisant considérablement les temps d'arrêt et les coûts de maintenance.
Grâce aux avantages intrinsèques des réducteurs planétaires, les moteurs à réducteur planétaire HONPINE sont largement utilisés dans divers domaines de la robotique.
Dans les robots quadrupèdes, ils répondent aux exigences de 12 degrés de liberté, en fournissant un entraînement stable et puissant pour les déplacements sur des terrains complexes.
Dans les bras robotiques, le réducteur planétaire de haute précision garantit un positionnement précis, permettant des tâches complexes telles que le soudage et la découpe.
Dans les robots humanoïdes, les réducteurs planétaires contribuent à obtenir des mouvements plus naturels et fluides, améliorant considérablement la coordination et la stabilité lors d'actions telles que la marche, le levage des bras et les transitions de posture.
Actionneurs Harmonic Drive pour robots humanoïdes- FAQ
Voici quelques-unes des questions techniques et d'achat les plus courantes que les clients posent lors de l'évaluation des modules d'articulation de robots humanoïdes et des systèmes d'actionnement. Les sujets incluent la sélection du couple, les rapports de réduction, le contrôle du mouvement, les protocoles de communication, la gestion thermique, les performances de marche dynamique et l'intégration avec les plateformes de robots humanoïdes.
Ce guide est destiné à aider les ingénieurs, les développeurs en robotique et les équipes d'approvisionnement à mieux comprendre comment sélectionner des solutions d'articulation adaptées à différentes tailles de robots humanoïdes, exigences de charge utile et scénarios d'application.
Pour plus de solutions de robots humanoïdes, veuillez contacter honpine
Le choix dépend de l'application de votre robot plutôt que de la technologie « meilleure ». Modules d'articulation harmonique : Un module d'articulation harmonique utilise un réducteur harmonique pour obtenir : un jeu quasi nul, une précision de positionnement extrêmement élevée, un contrôle de mouvement fluide et une conception compacte et légère. Ces caractéristiques rendent les actionneurs harmoniques idéaux pour : les bras de robots humanoïdes, les robots collaboratifs, les robots médicaux, l'automatisation de précision et les applications à contrôle de force. Modules d'articulation planétaire : Un actionneur d'articulation robotique planétaire offre : une rigidité structurelle supérieure, une meilleure résistance aux chocs, une capacité de couple plus élevée et un excellent rapport coût-performance. Les actionneurs planétaires sont couramment utilisés pour : les jambes de robots, les articulations de la taille, l'automatisation intensive, les robots mobiles et les applications à fort impact. De nombreux robots avancés combinent les deux technologies, utilisant des modules d'entraînement harmonique lorsque la précision est essentielle et des actionneurs planétaires lorsque la rigidité et la capacité de charge sont plus élevées.
Les engrenages internes du moteur à engrenages planétaires HONPINE sont fabriqués en acier allié à haute résistance, traités par cémentation et trempe, atteignant une dureté de surface de HRC 58–62. Associée à une graisse lubrifiante de qualité alimentaire, la durée de vie dépasse 10,000 heures dans des conditions de fonctionnement nominales, ce qui équivaut à environ 14 mois de fonctionnement industriel continu sans remplacer les composants principaux.
En outre, le moteur présente une conception d'étanchéité modulaire avec un indice de protection IP65, résistant efficacement à la poussière et aux éclaboussures de liquide, ce qui le rend adapté à des environnements spéciaux tels que la transformation alimentaire et la peinture automobile.
Les interfaces standardisées et la conception détachable du capot d'extrémité permettent la maintenance sans démonter l'ensemble du robot—les modules peuvent être remplacés directement, réduisant considérablement les temps d'arrêt et les coûts de maintenance.
Des applications industrielles telles que le tri par robot SCARA et le chargement et déchargement par bras robotique à six axes, aux applications médicales incluant les équipements d'entraînement à la rééducation et le contrôle de précision des robots chirurgicaux, et plus loin vers les marchés grand public tels que la simulation de la démarche des robots bioniques et la stabilisation de cardan des UAV, le module prend en charge plusieurs protocoles de communication, notamment CAN et RS485, permettant une compatibilité rapide avec les systèmes de contrôle de différentes marques.
Plus important encore, la combinaison d'une conception légère et d'une densité de couple élevée crée une forte polyvalence d'application :
Les modèles de petite taille peuvent être intégrés dans des cardans de UAV, garantissant une rotation fluide à 360° sans augmenter la charge utile.
Les modèles plus grands peuvent être intégrés dans des roues motrices d'AGV, prenant en charge un fonctionnement continu de 24 heures pour répondre aux exigences des opérations d'entreposage et de logistique ininterrompues.
Pour répondre aux exigences strictes de précision de la fabrication industrielle, le module adopte une structure de réduction à engrenages planétaires hélicoïdaux. Grâce à une conception optimisée de la surface des dents, le jeu d'engrenage est contrôlé dans 10 arcminutes (approximately 0.167°), atteignant une précision de positionnement répétée de ±12 arcminutes.
Combiné à un signal de commande haute fréquence de 3 kHz et à un temps de réponse de ≤200 μs, le système évite les pertes de produits causées par des retards ou des erreurs de positionnement, même dans des opérations au niveau du micron telles que l'assemblage de composants électroniques de précision et le soudage des languettes de batteries au lithium.
Pour les applications à charge élevée, le module utilise des matériaux d'engrenage renforcés de qualité militaire et des structures de roulement. Le couple de crête atteint jusqu'à 36 Nm, tandis que le couple de décrochage dépasse 24 Nm, équivalent à soulever de manière stable une charge de 3.6 kg. Cela fournit une puissance forte et fiable pour la locomotion porteuse de charge dans les robots quadrupèdes et l'assistance à la rééducation dans les robots exosquelettes.
Pour répondre aux exigences strictes de précision de la fabrication industrielle, le module adopte une structure de réduction à engrenages planétaires hélicoïdaux. Grâce à une conception optimisée de la surface des dents, le jeu d'engrenage est contrôlé dans 10 arcminutes (approximately 0.167°), atteignant une précision de positionnement répétée de ±12 arcminutes.
Combiné à un signal de commande haute fréquence de 3 kHz et à un temps de réponse de ≤200 μs, le système évite les pertes de produits causées par des retards ou des erreurs de positionnement, même dans des opérations au niveau du micron telles que l'assemblage de composants électroniques de précision et le soudage des languettes de batteries au lithium.
Pour les applications à charge élevée, le module utilise des matériaux d'engrenage renforcés de qualité militaire et des structures de roulement. Le couple de crête atteint jusqu'à 36 Nm, tandis que le couple de décrochage dépasse 24 Nm, équivalent à soulever de manière stable une charge de 3.6 kg. Cela fournit une puissance forte et fiable pour la locomotion porteuse de charge dans les robots quadrupèdes et l'assistance à la rééducation dans les robots exosquelettes.
Des applications industrielles telles que le tri par robot SCARA et le chargement et déchargement par bras robotique à six axes, aux applications médicales incluant les équipements d'entraînement à la rééducation et le contrôle de précision des robots chirurgicaux, et plus loin vers les marchés grand public tels que la simulation de la démarche des robots bioniques et la stabilisation de cardan des UAV, le module prend en charge plusieurs protocoles de communication, notamment CAN et RS485, permettant une compatibilité rapide avec les systèmes de contrôle de différentes marques.
Plus important encore, la combinaison d'une conception légère et d'une densité de couple élevée crée une forte polyvalence d'application :
Les modèles de petite taille peuvent être intégrés dans des cardans de UAV, garantissant une rotation fluide à 360° sans augmenter la charge utile.
Les modèles plus grands peuvent être intégrés dans des roues motrices d'AGV, prenant en charge un fonctionnement continu de 24 heures pour répondre aux exigences des opérations d'entreposage et de logistique ininterrompues.
Les engrenages internes du moteur à engrenages planétaires HONPINE sont fabriqués en acier allié à haute résistance, traités par cémentation et trempe, atteignant une dureté de surface de HRC 58–62. Associée à une graisse lubrifiante de qualité alimentaire, la durée de vie dépasse 10,000 heures dans des conditions de fonctionnement nominales, ce qui équivaut à environ 14 mois de fonctionnement industriel continu sans remplacer les composants principaux.
En outre, le moteur présente une conception d'étanchéité modulaire avec un indice de protection IP65, résistant efficacement à la poussière et aux éclaboussures de liquide, ce qui le rend adapté à des environnements spéciaux tels que la transformation alimentaire et la peinture automobile.
Les interfaces standardisées et la conception détachable du capot d'extrémité permettent la maintenance sans démonter l'ensemble du robot—les modules peuvent être remplacés directement, réduisant considérablement les temps d'arrêt et les coûts de maintenance.
Grâce aux avantages intrinsèques des réducteurs planétaires, les moteurs à réducteur planétaire HONPINE sont largement utilisés dans divers domaines de la robotique.
Dans les robots quadrupèdes, ils répondent aux exigences de 12 degrés de liberté, en fournissant un entraînement stable et puissant pour les déplacements sur des terrains complexes.
Dans les bras robotiques, le réducteur planétaire de haute précision garantit un positionnement précis, permettant des tâches complexes telles que le soudage et la découpe.
Dans les robots humanoïdes, les réducteurs planétaires contribuent à obtenir des mouvements plus naturels et fluides, améliorant considérablement la coordination et la stabilité lors d'actions telles que la marche, le levage des bras et les transitions de posture.
Le robot peut entrer dans un état de support sur une seule jambe, une marge de sécurité suffisante doit donc être réservée pour la charge utile du haut du corps la plus éloignée.
Une simulation dynamique est généralement effectuée sur la base de calculs du centre de masse et du bras de levier.
Oui.
Des paramètres tels que la taille, le poids, l’envergure des bras, la charge utile des bras, and les conditions de charge maximale en extension sont tous requis.
Il ne peut pas être calculé avec précision sans une charge utile clairement définie.
Vous pouvez vous référer à notre modèle 170A existant comme référence.
La charge utile de travail du haut du corps doit également être prise en compte.
HONPINE dispose de solides capacités d'ingénierie au niveau des systèmes dans de multiples domaines, notamment :
Technologies de détection
Systèmes énergétiques
Mouvement et actionnement
Conception industrielle
Cette intégration multidisciplinaire raccourcit considérablement le cycle de développement pour les clients de robots humanoïdes, en particulier du concept (0) au déploiement initial (1).
Cela dépend du protocole de communication.
Si le protocole suit la spécification standard DS402, alors ROS2 est pris en charge.
Les protocoles privés ne sont généralement pas pris en charge.
La latence est généralement de l’ordre de la microseconde (µs).
Les cycles de commande moteur typiques fonctionnent autour de 1 ms.
Les modules d'articulation intégrés HONPINE combinent plusieurs technologies de base en une seule unité compacte, notamment:
Contrôle servo
Entraînement moteur
Détection de couple
Système de transmission
Gestion thermique
Comparées aux systèmes traditionnels de servomoteurs, les solutions HONPINE offrent:
Une intégration plus élevée et un poids plus léger
Un couple de crête de sortie plus élevé
Une précision et des performances de contrôle supérieures
HONPINE vise à réduire les barrières techniques pour les clients développant des robots et des systèmes d'automatisation, permettant un développement et un déploiement plus rapides.
Le nombre d'actionneurs pour les articulations d'un robot dépend de sa structure et de son application. Pour un robot humanoïde typique : Jambes : 12 modules d'articulation ; Bras : 12 actionneurs ; Taille : 2 à 3 actionneurs ; Cou : 2 à 3 actionneurs ; Mains : actionneurs de main dextres (en option). Au total, un robot humanoïde de taille réelle nécessite généralement entre 30 et 40 modules d'articulation. Chaque articulation a des exigences différentes en matière de couple, de vitesse et de précision. Par exemple, les articulations des épaules et des hanches requièrent des actionneurs harmoniques à couple élevé, tandis que celles du poignet et du cou privilégient la compacité, la légèreté et une grande précision de positionnement. Le choix du moteur d'articulation approprié est essentiel pour optimiser les performances du robot.
Pas nécessairement.
Les versions avec pilotes intégrés incluent déjà la commande FOC en interne.
16 kHz est la fréquence standard couramment utilisée pour le contrôle des moteurs à courant continu.
La commande de position est généralement plus adaptée.
En raison de l'existence de la déformation élastique, le mode PT (commande synchrone position + couple) peut également être utilisé.
Les équipes de l’usine et techniques de HONPINE peuvent conjointement fournir une assistance pour l’intégration.
Cela dépend de l'utilisation de transmissions harmoniques ou de réducteurs planétaires.
Les réducteurs planétaires ont tendance à perdre leur précision plus rapidement.
Les réducteurs harmoniques s'usent également avec le temps, mais même après une dégradation de la précision, ils peuvent toujours maintenir une précision au niveau de la seconde d'arc.
Grâce à des systèmes de refroidissement actif et de refroidissement liquide.
Ce sont des paramètres différents.
Le couple continu désigne le couple de fonctionnement soutenu.
Le couple de pointe désigne le couple d'impact instantané avant qu'un dommage ne puisse survenir.
Cela dépend de la taille du robot humanoïde, comme 1.2 m, 1.4 m, 1.7 m, ou 2.4 m.
La charge utile du haut du corps compte également. Les exigences de couple doivent être calculées en fonction de la capacité de charge utile.
Pas nécessairement.
Cela dépend de la taille du robot humanoïde (1.2 m, 1.4 m, 1.7 m, 2.4 m, etc.) et de la charge utile du haut du corps.Différents niveaux de couple doivent être sélectionnés en fonction des exigences de charge.
Les moteurs sans noyau ont généralement une longueur axiale plus importante et un volume global plus grand, tandis que les moteurs couple sans cadre sont plus compacts en épaisseur.
Le choix dépend de la position d'application.
Les moteurs sans noyau ont généralement une plus grande longueur axiale et un volume global plus important, tandis que les moteurs couple sans carcasse sont plus compacts en épaisseur.
Le choix dépend de la position dans l'application.
Par exemple:
Les mains dexterous peuvent utiliser des moteurs sans noyau.
Les moteurs couple sans carcasse, avec des dimensions axiales plus courtes, conviennent mieux aux bras et aux structures similaires.
Cela dépend de la précision de contrôle requise et de l'environnement d'application.
Par exemple, la manutention industrielle et l'assemblage industriel nécessitent des niveaux de précision différents.
Le jeu approprié doit être sélectionné en fonction du scénario d'application réel.
Cela dépend de l'utilisation d'un réducteur harmonique ou d'un réducteur planétaire.
Les rapports de réduction des entraînements harmoniques sont couramment : 30, 50, 80, 100, 121, 161.
Les rapports de réduction des engrenages planétaires sont généralement inférieurs à 50.
Le rapport doit être sélectionné conjointement avec la taille globale et la conception structurelle.
Précautions d'utilisation des modules d'articulation robotique
Pour plus d'informations sur les questions avant-vente et après-vente concernant les modules d'articulation, veuillez nous contacter. HONPINE fournira un support technique individuel.
● Fonctionnement sécurisé:Ne branchez ni ne débranchez les câbles lorsque l'appareil est sous tension. Avant de déconnecter les condensateurs, assurez-vous qu'ils sont complètement déchargés.
● Installation de l'équipement: Vérifiez que la structure d'installation possède une résistance mécanique suffisante pour supporter le poids de l'articulation intégrée et garantir un montage sécurisé.
● Serrage des vis: Lors du serrage des vis entre le moteur et les composants structurels, un adhésif frein-filet et une clé dynamométrique doivent être utilisés. Suivez strictement les spécifications de couple fournies dans le manuel du moteur.
● Normes de câblage: Effectuez le câblage en respectant strictement la définition des broches. Ne vous fiez pas aux couleurs des câbles pour l'identification, et assurez-vous d'une correspondance correcte de la résistance.
● Utilisation de l'alimentation électrique: Vérifiez que la tension d'alimentation correspond à la tension nominale de l'articulation intégrée. Lorsque les utilisateurs connectent des batteries au lithium externes, si la tension nominale est de 48V, la tension de la batterie complètement chargée peut dépasser 60V au démarrage, ce qui pourrait affecter le fonctionnement du moteur, voire endommager le moteur. Les mesures préventives incluent l'installation de condensateurs électrolytiques pour lisser la tension ou la connexion d'un module de régulation de tension en série avec l'entrée d'alimentation du moteur afin de stabiliser la tension d'alimentation.
● Systèmes d'alimentation par batterie: Dans les systèmes alimentés par batterie, la batterie elle-même peut absorber le courant inverse et aider à empêcher la tension de dépasser la limite nominale.
● Systèmes d'alimentation à découpage: Dans les systèmes d'alimentation à découpage, le moteur intégré peut générer de l'énergie régénérative lors d'une décélération rapide ou lorsqu'il est entraîné par des charges gravitationnelles, provoquant une élévation de la tension du bus DC et pouvant déclencher des alarmes de surtension. Pour éviter cela, il est recommandé d'installer en parallèle des condensateurs électrolytiques de grande capacité ou d'ajouter des résistances de freinage pour réduire les pics de tension.
● Éviter les chocs électriques et les blessures par écrasement: Lorsque le moteur est sous tension, en fonctionnement ou connecté à des composants structurels, ne touchez jamais directement le moteur avec la main afin d'éviter les chocs électriques ou les blessures par écrasement causées par des structures en mouvement.
● Démontage du moteur: Le démontage non autorisé du moteur est interdit. Le démontage n'est autorisé que dans des circonstances particulières après consultation et sous guidance professionnelle. Tout démontage non autorisé annulera la garantie.
● Transport après démontage: Si le moteur est démonté sous guidance et doit être retourné, assurez-vous que toutes les vis d'origine sont correctement réinstallées et fixées avant l'expédition afin d'éviter les dommages de transport causés par les vibrations ou les chocs, y compris les vis du réducteur, les vis du couvercle arrière et les autres composants de fixation.
Tendances du secteur
- 00
0000-00
Qu'est-ce qu'un actionneur d'articulation robotique ?Comment choisir le meilleur actionneur rotatif d'articulation robotique ?
- 00
0000-00
OMG Module Ultra Compact d'Entraînement Harmonique avec Capteur de Couple Intégré
- 00
0000-00
Comment les réducteurs RV de précision révolutionnent-ils les positionneurs de soudage ?
- 00
0000-00
Moteur AC harmonique VS moteur DC harmonique
- 00
0000-00
Actionneurs linéaires vs actionneurs rotatifs : Le choix central pour les articulations des robots humanoïdes





Tendances du secteur
- 00
0000-00
Qu'est-ce qu'un actionneur d'articulation robotique ?Comment choisir le meilleur actionneur rotatif d'articulation robotique ?
- 00
0000-00
OMG Module Ultra Compact d'Entraînement Harmonique avec Capteur de Couple Intégré
- 00
0000-00
Comment les réducteurs RV de précision révolutionnent-ils les positionneurs de soudage ?
- 00
0000-00
Moteur AC harmonique VS moteur DC harmonique
- 00
0000-00
Actionneurs linéaires vs actionneurs rotatifs : Le choix central pour les articulations des robots humanoïdes
