Effecteur terminal de robot industriel/Main robotique dextre
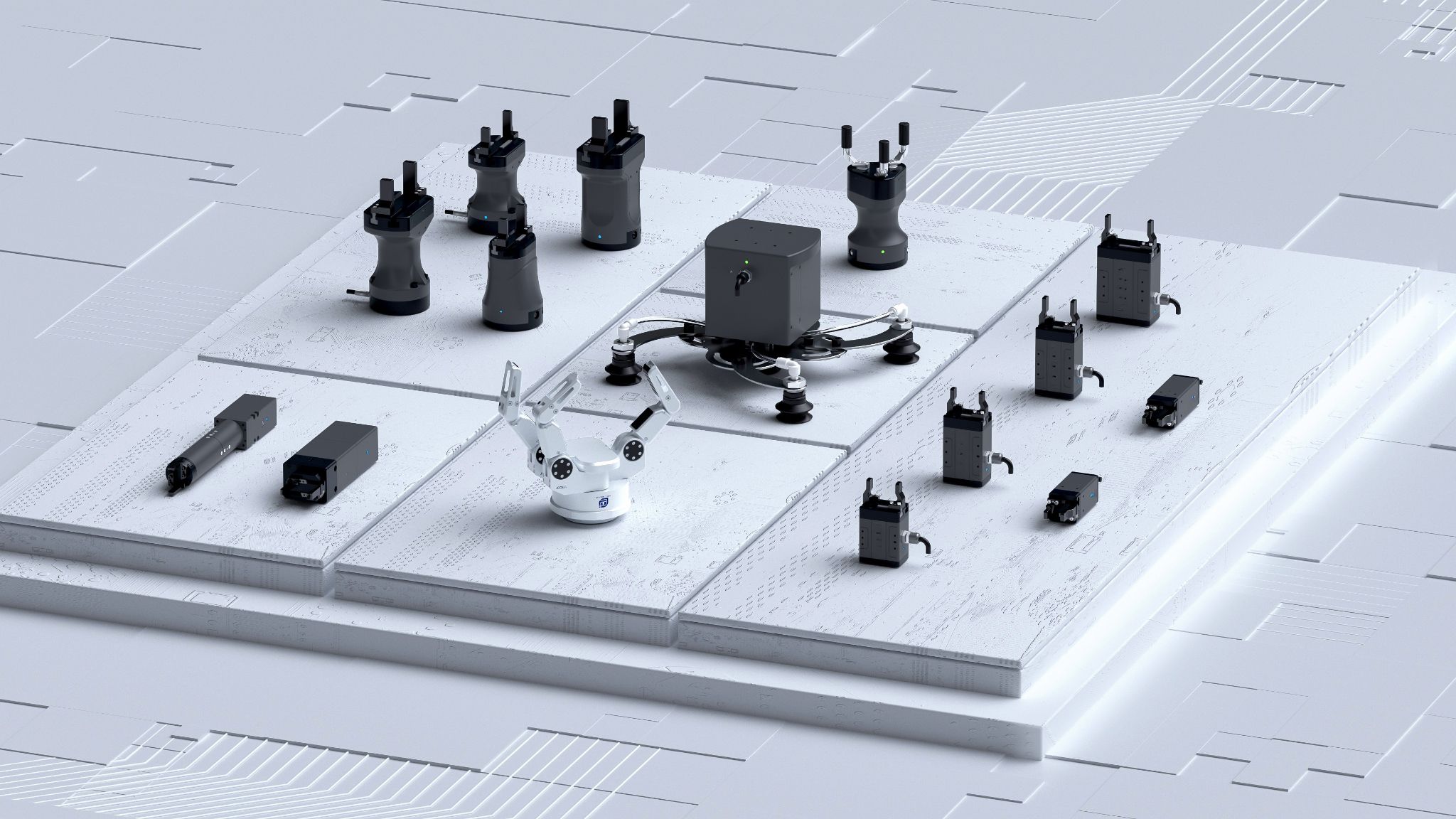
L'effecteur électrique est un composant clé situé à l'extrémité d'un robot industriel, utilisé pour effectuer des opérations précises telles que la saisie, la préhension, l'adsorption, la manutention et l'assemblage. Il permet une réponse à haute vitesse et un contrôle de haute précision grâce à une commande électrique, remplaçant les méthodes traditionnelles pneumatiques ou hydrauliques, et est largement utilisé dans la fabrication 3C, l'assemblage automobile, la production de batteries pour énergies nouvelles et autres domaines. Comparé aux actionneurs traditionnels, ses technologies clés incluent la commande servo, la détection intelligente et la conception modulaire pour répondre aux besoins de production flexible. Les effecteurs électriques peuvent être classés en pinces électriques, ventouses électriques, mains habiles robotisées et micro-vérins électriques selon leurs formes et leurs scénarios d'application.
Main robotique dextre
 Gant exosquelette mécanique de téléopération haute précisionLe gant exosquelette mécanique Honpine EG est un produit dédié à la capture haute précision des mouvements de la main et au contrôle auxiliaire. Équipé de la technologie centrale d'encodeur magnétique, le gant offre non seulement une grande précision dans la détection des angles des articulations de la main, mais élimine également la dérive de position. De plus, en intégrant la technologie de transmission sans fil ESP-NOW avec un algorithme d'étalonnage de cartographie dynamique, il permet une téléopération haute précision des mains habiles. Actuellement, le produit est largement applicable dans les domaines de la fabrication industrielle, de la rééducation médicale, de la recherche scientifique et d'autres domaines, répondant aux besoins pratiques d'application dans divers scénarios.Détails
Gant exosquelette mécanique de téléopération haute précisionLe gant exosquelette mécanique Honpine EG est un produit dédié à la capture haute précision des mouvements de la main et au contrôle auxiliaire. Équipé de la technologie centrale d'encodeur magnétique, le gant offre non seulement une grande précision dans la détection des angles des articulations de la main, mais élimine également la dérive de position. De plus, en intégrant la technologie de transmission sans fil ESP-NOW avec un algorithme d'étalonnage de cartographie dynamique, il permet une téléopération haute précision des mains habiles. Actuellement, le produit est largement applicable dans les domaines de la fabrication industrielle, de la rééducation médicale, de la recherche scientifique et d'autres domaines, répondant aux besoins pratiques d'application dans divers scénarios.Détails Gant de téléopération robotique intelligent pour opérations à distance en réalité virtuelle et augmentéeLe gant de téléopération HONPINE est un dispositif de capture de mouvements de la main de haute précision, conçu pour la robotique intelligente et les applications de télécommande. Grâce à une technologie de capture de mouvements avancée et à un algorithme de cartographie dynamique développé en interne, ce gant permet un contrôle précis des mains. En capturant et en transmettant les mouvements de la main en temps réel, il permet aux utilisateurs de manipuler des mains robotisées de manière naturelle et intuitive, répondant ainsi aux besoins de diverses applications telles que les opérations à distance, la réalité virtuelle (RV), la réalité augmentée (RA) et l'industrie 4.0.Détails
Gant de téléopération robotique intelligent pour opérations à distance en réalité virtuelle et augmentéeLe gant de téléopération HONPINE est un dispositif de capture de mouvements de la main de haute précision, conçu pour la robotique intelligente et les applications de télécommande. Grâce à une technologie de capture de mouvements avancée et à un algorithme de cartographie dynamique développé en interne, ce gant permet un contrôle précis des mains. En capturant et en transmettant les mouvements de la main en temps réel, il permet aux utilisateurs de manipuler des mains robotisées de manière naturelle et intuitive, répondant ainsi aux besoins de diverses applications telles que les opérations à distance, la réalité virtuelle (RV), la réalité augmentée (RA) et l'industrie 4.0.Détails- Contrôle de haute précision 21-DoF Main humaine industrielle dextreHONPINE L30 est une main dextre 21-DoF qui reproduit avec précision les mouvements fins de la main humaine avec une précision d'opération au millimètre. Elle adopte une commande par tendon avancée et des systèmes mécatroniques hautement intégrés pour un mouvement stable et un contrôle précis, et prend en charge une perception multimodale (force, toucher, vision) pour améliorer la perception en temps réel et la fiabilité de l'interaction. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes de contrôle de mouvement de pointe, elle est largement utilisée dans l'automatisation industrielle, l'assistance médicale et les expériences de recherche, offrant une solution d'effecteur terminal hautement adaptable et fiable.Détails
- Main préhensile dextre à haute précision à 21 degrés de liberté simulant la préhension naturelle de la main humaineLe HONPINE L20 est une main dextre à 21 degrés de liberté qui simule avec précision la préhension naturelle de la main humaine pour des opérations délicates. Il adopte une transmission par liaison innovante et des moteurs développés en interne pour un mouvement de haute précision, et prend en charge des capteurs de force, de vision et tactile, améliorant ainsi l'adaptabilité environnementale et l'interaction intelligente via une perception multimodale. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes hybrides force-position, il est largement utilisé dans l'éducation et la recherche, l'automatisation industrielle, l'assistance domestique et les soins aux personnes âgées, offrant des solutions d'opération précises et dextres.Détails
- Main haute bionique robotisée à contrôle précis haute performanceHONPINE Robot Hand L10 est une main habile haute performance dotée de 20 degrés de liberté (DoF). Équipée de moteurs et de mécanismes de transmission à liaison développés en interne, elle garantit une stabilité de traction tout en permettant un contrôle précis et des mouvements fluides. Utilisée dans l'éducation et la recherche, les performances pianistiques, l'assistance domestique et les soins aux personnes âgées, elle favorise l'avancement et la mise en œuvre des robots intelligents et de la collaboration homme-robot. Elle prend en charge la perception
environnementale multi-modale via divers capteurs et est compatible avec les environnements ROS/QT (avec des plugins ROS standard pour le développement secondaire).Détails  Main dextre haute performance à 17 DoF pour systèmes robotiquesLa main robotique HONPINE 07 est une main dextre haute performance dotée de 17 degrés de liberté. Alimentée par des moteurs développés en interne, elle allie maîtrise des coûts et performances fiables de préhension et d'opération, répondant à divers besoins applicatifs. Elle propose des plugins ROS pour le développement secondaire, adaptée à l'éducation & recherche, la préhension assistée et l'interaction intelligente - offrant une solution de main dextre efficace et économique pour systèmes robotiques.Détails
Main dextre haute performance à 17 DoF pour systèmes robotiquesLa main robotique HONPINE 07 est une main dextre haute performance dotée de 17 degrés de liberté. Alimentée par des moteurs développés en interne, elle allie maîtrise des coûts et performances fiables de préhension et d'opération, répondant à divers besoins applicatifs. Elle propose des plugins ROS pour le développement secondaire, adaptée à l'éducation & recherche, la préhension assistée et l'interaction intelligente - offrant une solution de main dextre efficace et économique pour systèmes robotiques.Détails- Main bionique compacte à haute force de préhension et haute précisionLa main bionique HONPINE O6 dispose de 6 articulations actives et 5 articulations passives. Elle offre une force de préhension élevée, un contrôle de force précis, une taille compacte et un design léger. Elle est particulièrement adaptée à des applications telles que la manutention logistique, l'assemblage industriel et la saisie d'objets de forme irrégulière.Détails
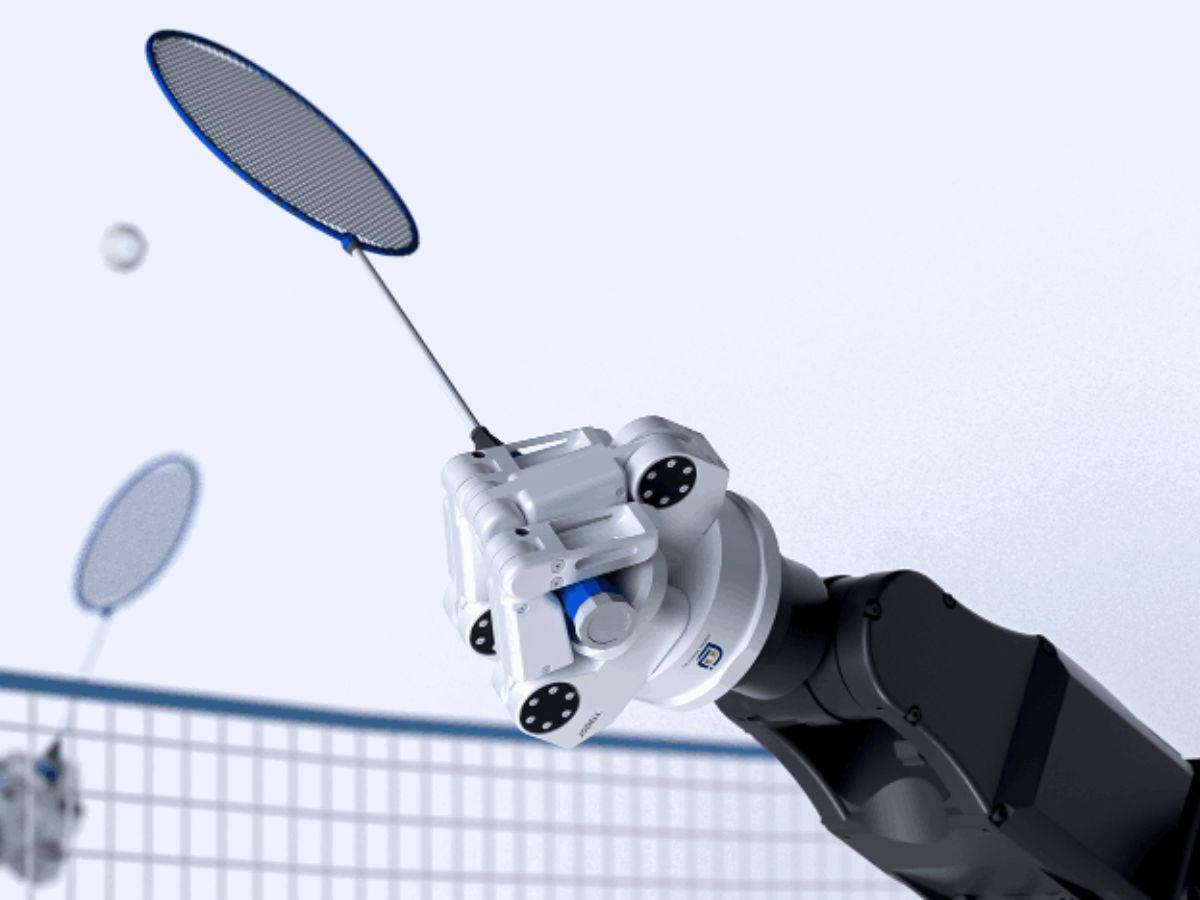
- Main robotique à articulation de doigts humanoïdesLa main robotique dextre est un effecteur terminal de robot très similaire à la main humaine. Elle adopte une conception anthropomorphique à cinq doigts et simule le mouvement articulaire de la main humaine grâce à plus de 15 degrés de liberté pour réaliser des opérations fines comme la préhension et la pince. C'est l'élément clé permettant au robot d'exécuter des tâches complexes. Elle appartient à la catégorie des dispositifs de préhension parmi les effecteurs terminaux des robots. Contrairement aux pinces traditionnelles à deux doigts, elle possède des capacités de perception multimodale et de contrôle intelligent, peut s'adapter à des objets irréguliers et accomplir des tâches de manipulation de précision.Détails








Pince électrique
 Gant exosquelette mécanique de téléopération haute précisionLe gant exosquelette mécanique Honpine EG est un produit dédié à la capture haute précision des mouvements de la main et au contrôle auxiliaire. Équipé de la technologie centrale d'encodeur magnétique, le gant offre non seulement une grande précision dans la détection des angles des articulations de la main, mais élimine également la dérive de position. De plus, en intégrant la technologie de transmission sans fil ESP-NOW avec un algorithme d'étalonnage de cartographie dynamique, il permet une téléopération haute précision des mains habiles. Actuellement, le produit est largement applicable dans les domaines de la fabrication industrielle, de la rééducation médicale, de la recherche scientifique et d'autres domaines, répondant aux besoins pratiques d'application dans divers scénarios.Détails
Gant exosquelette mécanique de téléopération haute précisionLe gant exosquelette mécanique Honpine EG est un produit dédié à la capture haute précision des mouvements de la main et au contrôle auxiliaire. Équipé de la technologie centrale d'encodeur magnétique, le gant offre non seulement une grande précision dans la détection des angles des articulations de la main, mais élimine également la dérive de position. De plus, en intégrant la technologie de transmission sans fil ESP-NOW avec un algorithme d'étalonnage de cartographie dynamique, il permet une téléopération haute précision des mains habiles. Actuellement, le produit est largement applicable dans les domaines de la fabrication industrielle, de la rééducation médicale, de la recherche scientifique et d'autres domaines, répondant aux besoins pratiques d'application dans divers scénarios.Détails Gant de téléopération robotique intelligent pour opérations à distance en réalité virtuelle et augmentéeLe gant de téléopération HONPINE est un dispositif de capture de mouvements de la main de haute précision, conçu pour la robotique intelligente et les applications de télécommande. Grâce à une technologie de capture de mouvements avancée et à un algorithme de cartographie dynamique développé en interne, ce gant permet un contrôle précis des mains. En capturant et en transmettant les mouvements de la main en temps réel, il permet aux utilisateurs de manipuler des mains robotisées de manière naturelle et intuitive, répondant ainsi aux besoins de diverses applications telles que les opérations à distance, la réalité virtuelle (RV), la réalité augmentée (RA) et l'industrie 4.0.Détails
Gant de téléopération robotique intelligent pour opérations à distance en réalité virtuelle et augmentéeLe gant de téléopération HONPINE est un dispositif de capture de mouvements de la main de haute précision, conçu pour la robotique intelligente et les applications de télécommande. Grâce à une technologie de capture de mouvements avancée et à un algorithme de cartographie dynamique développé en interne, ce gant permet un contrôle précis des mains. En capturant et en transmettant les mouvements de la main en temps réel, il permet aux utilisateurs de manipuler des mains robotisées de manière naturelle et intuitive, répondant ainsi aux besoins de diverses applications telles que les opérations à distance, la réalité virtuelle (RV), la réalité augmentée (RA) et l'industrie 4.0.Détails Contrôle de haute précision 21-DoF Main humaine industrielle dextreHONPINE L30 est une main dextre 21-DoF qui reproduit avec précision les mouvements fins de la main humaine avec une précision d'opération au millimètre. Elle adopte une commande par tendon avancée et des systèmes mécatroniques hautement intégrés pour un mouvement stable et un contrôle précis, et prend en charge une perception multimodale (force, toucher, vision) pour améliorer la perception en temps réel et la fiabilité de l'interaction. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes de contrôle de mouvement de pointe, elle est largement utilisée dans l'automatisation industrielle, l'assistance médicale et les expériences de recherche, offrant une solution d'effecteur terminal hautement adaptable et fiable.Détails
Contrôle de haute précision 21-DoF Main humaine industrielle dextreHONPINE L30 est une main dextre 21-DoF qui reproduit avec précision les mouvements fins de la main humaine avec une précision d'opération au millimètre. Elle adopte une commande par tendon avancée et des systèmes mécatroniques hautement intégrés pour un mouvement stable et un contrôle précis, et prend en charge une perception multimodale (force, toucher, vision) pour améliorer la perception en temps réel et la fiabilité de l'interaction. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes de contrôle de mouvement de pointe, elle est largement utilisée dans l'automatisation industrielle, l'assistance médicale et les expériences de recherche, offrant une solution d'effecteur terminal hautement adaptable et fiable.Détails Main préhensile dextre à haute précision à 21 degrés de liberté simulant la préhension naturelle de la main humaineLe HONPINE L20 est une main dextre à 21 degrés de liberté qui simule avec précision la préhension naturelle de la main humaine pour des opérations délicates. Il adopte une transmission par liaison innovante et des moteurs développés en interne pour un mouvement de haute précision, et prend en charge des capteurs de force, de vision et tactile, améliorant ainsi l'adaptabilité environnementale et l'interaction intelligente via une perception multimodale. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes hybrides force-position, il est largement utilisé dans l'éducation et la recherche, l'automatisation industrielle, l'assistance domestique et les soins aux personnes âgées, offrant des solutions d'opération précises et dextres.Détails
Main préhensile dextre à haute précision à 21 degrés de liberté simulant la préhension naturelle de la main humaineLe HONPINE L20 est une main dextre à 21 degrés de liberté qui simule avec précision la préhension naturelle de la main humaine pour des opérations délicates. Il adopte une transmission par liaison innovante et des moteurs développés en interne pour un mouvement de haute précision, et prend en charge des capteurs de force, de vision et tactile, améliorant ainsi l'adaptabilité environnementale et l'interaction intelligente via une perception multimodale. Avec un nombre élevé de degrés de liberté, une perception multimodale et des algorithmes hybrides force-position, il est largement utilisé dans l'éducation et la recherche, l'automatisation industrielle, l'assistance domestique et les soins aux personnes âgées, offrant des solutions d'opération précises et dextres.Détails Main haute bionique robotisée à contrôle précis haute performanceHONPINE Robot Hand L10 est une main habile haute performance dotée de 20 degrés de liberté (DoF). Équipée de moteurs et de mécanismes de transmission à liaison développés en interne, elle garantit une stabilité de traction tout en permettant un contrôle précis et des mouvements fluides. Utilisée dans l'éducation et la recherche, les performances pianistiques, l'assistance domestique et les soins aux personnes âgées, elle favorise l'avancement et la mise en œuvre des robots intelligents et de la collaboration homme-robot. Elle prend en charge la perception
Main haute bionique robotisée à contrôle précis haute performanceHONPINE Robot Hand L10 est une main habile haute performance dotée de 20 degrés de liberté (DoF). Équipée de moteurs et de mécanismes de transmission à liaison développés en interne, elle garantit une stabilité de traction tout en permettant un contrôle précis et des mouvements fluides. Utilisée dans l'éducation et la recherche, les performances pianistiques, l'assistance domestique et les soins aux personnes âgées, elle favorise l'avancement et la mise en œuvre des robots intelligents et de la collaboration homme-robot. Elle prend en charge la perception
environnementale multi-modale via divers capteurs et est compatible avec les environnements ROS/QT (avec des plugins ROS standard pour le développement secondaire).Détails Main dextre haute performance à 17 DoF pour systèmes robotiquesLa main robotique HONPINE 07 est une main dextre haute performance dotée de 17 degrés de liberté. Alimentée par des moteurs développés en interne, elle allie maîtrise des coûts et performances fiables de préhension et d'opération, répondant à divers besoins applicatifs. Elle propose des plugins ROS pour le développement secondaire, adaptée à l'éducation & recherche, la préhension assistée et l'interaction intelligente - offrant une solution de main dextre efficace et économique pour systèmes robotiques.Détails
Main dextre haute performance à 17 DoF pour systèmes robotiquesLa main robotique HONPINE 07 est une main dextre haute performance dotée de 17 degrés de liberté. Alimentée par des moteurs développés en interne, elle allie maîtrise des coûts et performances fiables de préhension et d'opération, répondant à divers besoins applicatifs. Elle propose des plugins ROS pour le développement secondaire, adaptée à l'éducation & recherche, la préhension assistée et l'interaction intelligente - offrant une solution de main dextre efficace et économique pour systèmes robotiques.Détails Main bionique compacte à haute force de préhension et haute précisionLa main bionique HONPINE O6 dispose de 6 articulations actives et 5 articulations passives. Elle offre une force de préhension élevée, un contrôle de force précis, une taille compacte et un design léger. Elle est particulièrement adaptée à des applications telles que la manutention logistique, l'assemblage industriel et la saisie d'objets de forme irrégulière.Détails
Main bionique compacte à haute force de préhension et haute précisionLa main bionique HONPINE O6 dispose de 6 articulations actives et 5 articulations passives. Elle offre une force de préhension élevée, un contrôle de force précis, une taille compacte et un design léger. Elle est particulièrement adaptée à des applications telles que la manutention logistique, l'assemblage industriel et la saisie d'objets de forme irrégulière.Détails Main robotique à articulation de doigts humanoïdesLa main robotique dextre est un effecteur terminal de robot très similaire à la main humaine. Elle adopte une conception anthropomorphique à cinq doigts et simule le mouvement articulaire de la main humaine grâce à plus de 15 degrés de liberté pour réaliser des opérations fines comme la préhension et la pince. C'est l'élément clé permettant au robot d'exécuter des tâches complexes. Elle appartient à la catégorie des dispositifs de préhension parmi les effecteurs terminaux des robots. Contrairement aux pinces traditionnelles à deux doigts, elle possède des capacités de perception multimodale et de contrôle intelligent, peut s'adapter à des objets irréguliers et accomplir des tâches de manipulation de précision.Détails
Main robotique à articulation de doigts humanoïdesLa main robotique dextre est un effecteur terminal de robot très similaire à la main humaine. Elle adopte une conception anthropomorphique à cinq doigts et simule le mouvement articulaire de la main humaine grâce à plus de 15 degrés de liberté pour réaliser des opérations fines comme la préhension et la pince. C'est l'élément clé permettant au robot d'exécuter des tâches complexes. Elle appartient à la catégorie des dispositifs de préhension parmi les effecteurs terminaux des robots. Contrairement aux pinces traditionnelles à deux doigts, elle possède des capacités de perception multimodale et de contrôle intelligent, peut s'adapter à des objets irréguliers et accomplir des tâches de manipulation de précision.Détails
Micro vérin électrique


Application de l'effecteur terminal de robot
L'effecteur terminal de robot propose neuf séries incluant des mains dextres industrielles, des pinces électriques intelligentes, desventouses électriques et des modèles multifonctionnels pour l'automatisation médicale, les batteries lithium, le 3C, les semi-conducteurs etl'industrie alimentaire. Compacts, nos actionneurs garantissent haute précision, rigidité élevée et course ultra-longue avec
un contrôle de force précis. Ils supportent les applications réseau, sont faciles à installer et simples à utiliser—offrantdes solutions d'automatisation sûres et efficaces pour divers besoins de production.
L'effecteur terminal de robot propose neuf séries incluant des mains dextres industrielles, des pinces électriques intelligentes, desventouses électriques et des modèles multifonctionnels pour l'automatisation médicale, les batteries lithium, le 3C, les semi-conducteurs etl'industrie alimentaire. Compacts, nos actionneurs garantissent haute précision, rigidité élevée et course ultra-longue avec
un contrôle de force précis. Ils supportent les applications réseau, sont faciles à installer et simples à utiliser—offrantdes solutions d'automatisation sûres et efficaces pour divers besoins de production.
‹


›

- 00
0000-00
Comment le module de joint intégré à réducteur harmonique du robot humanoïde HONPINE HPJM a-t-il attiré l'attention des fabricants de robots humanoïdes ?
- 00
0000-00
Qu'est-ce qu'un actionneur d'articulation robotique ?Comment choisir le meilleur actionneur rotatif d'articulation robotique ?
- 00
0000-00
OMG Module Ultra Compact d'Entraînement Harmonique avec Capteur de Couple Intégré
- 00
0000-00
Moteur AC harmonique VS moteur DC harmonique
- 00
0000-00
Actionneurs linéaires vs actionneurs rotatifs : Le choix central pour les articulations des robots humanoïdes





